推荐
专栏
教程
课程
飞鹅
本次共找到1233条
排序算法
相关的信息
公众号: 奋飞安全
•
3年前
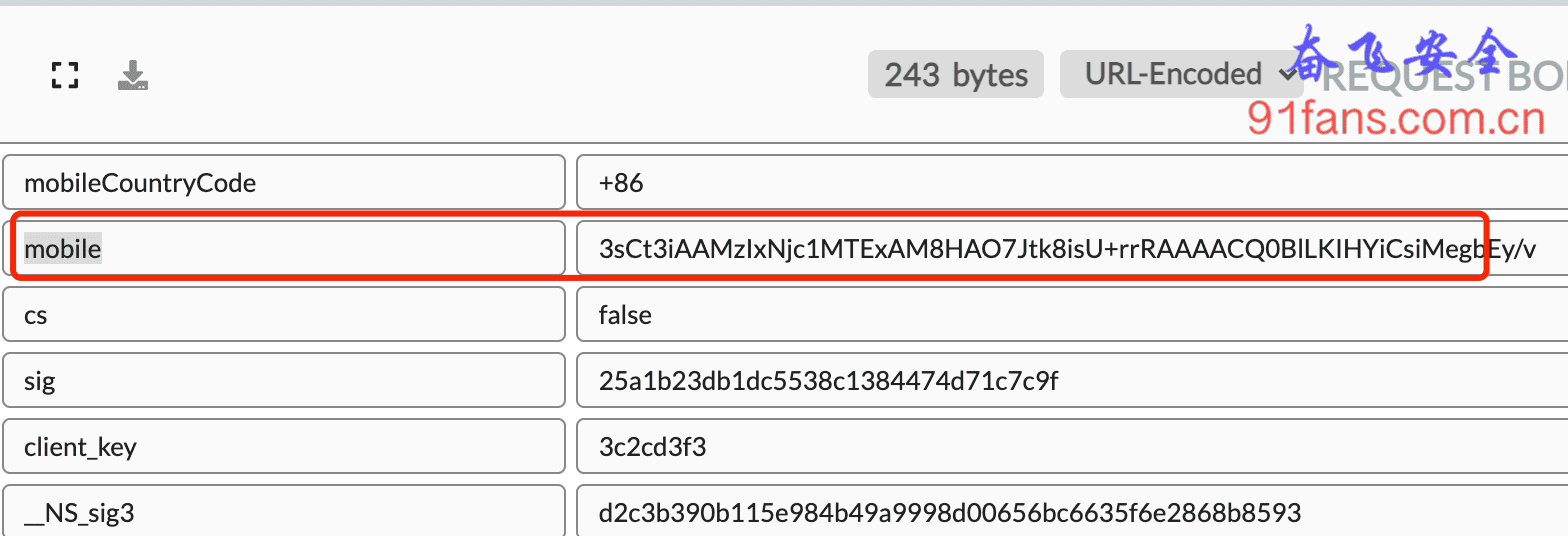
某小视频App v10.x 手机号加密算法分析
一、目标今天的目标是手机号加密,app变化太快,以前都是明文的。TIP:某小视频Appv10.2.30.24518二、步骤字符串匹配也许是手机号都是1xx开头,也许是这个加密字符串有个特征头。反正经过我们观察,发现它大概率是3sCt开头。而这种加密算法大概率是在Native层去做的。所以我们首选是去hooklibart里面的GetSt
Stella981
•
4年前
AI算法让图片动起来,特朗普和蒙娜丽莎深情合唱《Unravel》
本文GitHub https://github.com/JackCherish/PythonPark(https://www.oschina.net/action/GoToLink?urlhttps%3A%2F%2Fgithub.com%2FJackCherish%2FPythonPark) 已收录,技术干货文章、学习资料、一线大厂面试经验等
Stella981
•
4年前
JVM系列篇:JVM的4种垃圾回收算法、垃圾回收机制与总结
本系列持续更新。!(https://oscimg.oschina.net/oscnet/a43214d8507685503ab3a97c404ea79146d.jpg)
贾蔷
•
8个月前
2023年GESP六级小杨握手问题(洛谷B3874):Fenwick树求解逆序对的代码解析
一、题目解读“小杨的握手问题”源自2023年GESP六级考试(对应洛谷题目B3874)。题目描述为:给定一个长度为N的排列,每次将当前数与之前未访问过的数握手,求总共握手次数。本质上是求排列中逆序对的个数,即统计每个数右侧比它小的元素数量。需设计高效算法在
深度学习
•
8个月前
洛谷1111题解:基于Kruskal算法与并查集的最小生成树实现
一、题目解读洛谷1111题是一道经典的图论问题,要求构建一个无向图的最小生成树,并输出其最大边权值。题目核心在于通过给定的边集合,找到连接所有节点的最小权值子集,同时保证无环。这通常涉及最小生成树算法(如Kruskal)的应用,需要高效处理边权重与节点连通
贾蔷
•
8个月前
2023年GESP四级图像压缩题(洛谷B3851)解析与代码实现
一、题目解读本题要求实现图像压缩算法,通过处理输入的灰度图像数据(以十六进制表示的像素值),将其转换为压缩后的表示形式。核心目标是通过统计灰度频率,选取前16个高频灰度值构建压缩表,并利用最小距离替换将原始像素映射到压缩表索引,从而减少数据量。题目考察对数
深度学习
•
7个月前
2013年蓝桥杯国赛C组危险系数(洛谷P8604):图论算法解密
一、问题描述地下网络由多个站点和连接通道组成。当某个站点被敌人破坏后,可能导致其他站点间失去联系。DF(x,y)定义为:使站点x和y断开连接的所有关键点z的数量。二、核心思想1.表示:使用网络结构1.连通性检查:算法1.关键点判定:逐个排除节点后检查连通性
深度学习
•
7个月前
牛客网235698题:用滑动窗口寻找最多包含两种字符的最长子串
一、什么是?是一种用于处理/子区间问题的技术。它通过维护一个窗口(通常是子数组或子字符串),在遍历过程中动态调整窗口的边界,从而高效地解决问题。二、算法核心思想1.初始化窗口:通常从数组/字符串的起始位置开始1.扩展窗口:移动右边界,扩大窗口范围1
京东云开发者
•
3年前
京东云开发者|经典同态加密算法Paillier解读 - 原理、实现和应用
!(https://p26.toutiaoimg.com/img/toscniqvj2lq49k0/67d874465aa142149ff14a23b92fc9f7~tplvttshrink:640:0.image)摘要随着云
近屿智能
•
9个月前
特斯拉机器人招聘潮来袭,近屿智能带你紧抓AI职业风口
特斯拉正在大规模扩展其人形机器人擎天柱(Optimus)项目,启动史上最庞大的招聘计划。据其官网披露,本次招募岗位数量近80个,分布在美国四大核心制造基地,涵盖从AI核心算法到机器人制造工艺的全产业链岗位布局。其中超过66%的岗位聚焦于人工智能与机器人领域
1
•••
98
99
100
•••
124