推荐
专栏
教程
课程
飞鹅
本次共找到291条
规划求解
相关的信息
Kubrnete
•
4年前
基于01背包问题的动态规划算法
目录初步认识动态规划(初步认识动态规划)与动态规划有关的理论知识:(与动态规划有关的理论知识:)动态规划中的最优决策表(基于填表的动态规划算法)最终版动态规划(最终版动态规划)总结(总结:)初步认识动态规划动态规划算法是通过拆分问题,定义问题状态和状态之间的关系,使得问题能够以递推
Wesley13
•
4年前
DLX 求解数独
原文链接: DLX求解数独(https://my.oschina.net/ahaoboy/blog/4693206)https://www.cnblogs.com/grenet/p/3145800.html(https://www.oschina.net/action/GoToLink?urlhttps%3A%2F%2Fwww.cnblogs
Wesley13
•
4年前
ubuntu18.04环境下为UR3配置MoveIt!运动学插件IKFAST(二)
前言昨天已经将OpenRAVE配置好了,接下来就是配置IKFast插件了。ikfast,机器人运动学的编译器,在RosenDiankovOpenRAVE运动规划软件提供,是一个强大的逆运动学求解器。不像大多数的逆运动学求解,ikfast可以求解任意复杂运动链的运动学方程,并产生特定语言的文件(如C)后供使用。最终的结果是非常稳定的解决方
Wesley13
•
4年前
JS求解数独算法
functiongetNext(board){varresultnull;for(leti0;i<9;i){if(!result){for(letj0;j<9;j){if(boardi
Wesley13
•
4年前
01背包问题(动态规划求解)
这两天c的习题开始不考察c了,开始考察动态规划问题,唉,没学过动态规划算法来编这题目真是一把辛酸泪,下面给出题目(题目来源:郭玮老师的mooc)2:CharmBracelet查看提交统计提问总时间限制:1000ms内存限制:65536kB描述Bessiehasgonetothemall’s
深度学习
•
7个月前
洛谷P2758题解:动态规划求解编辑距离的完整攻略
一、题目解读P2758题要求计算两个之间的编辑距离,即通过插入、删除、替换三种操作将字符串A转换为B所需的最小操作次数。题目考察的核心是在中的应用,需要找到最优的路径。二、解题思路采用(DynamicProgramming)策略。核心思想是构建二维dp,d
菜园前端
•
2年前
什么是动态规划?
原文链接:什么是动态规划?动态规划也是算法设计的一种方法/思想。它将一个问题分解为相互重叠的子问题,通过反复求解子问题,来解决原来的问题。基础案例场景一斐波那契数列当前数等于前面两个数的和。定义子问题:f(n)f(n1)f(n2)
贾蔷
•
8个月前
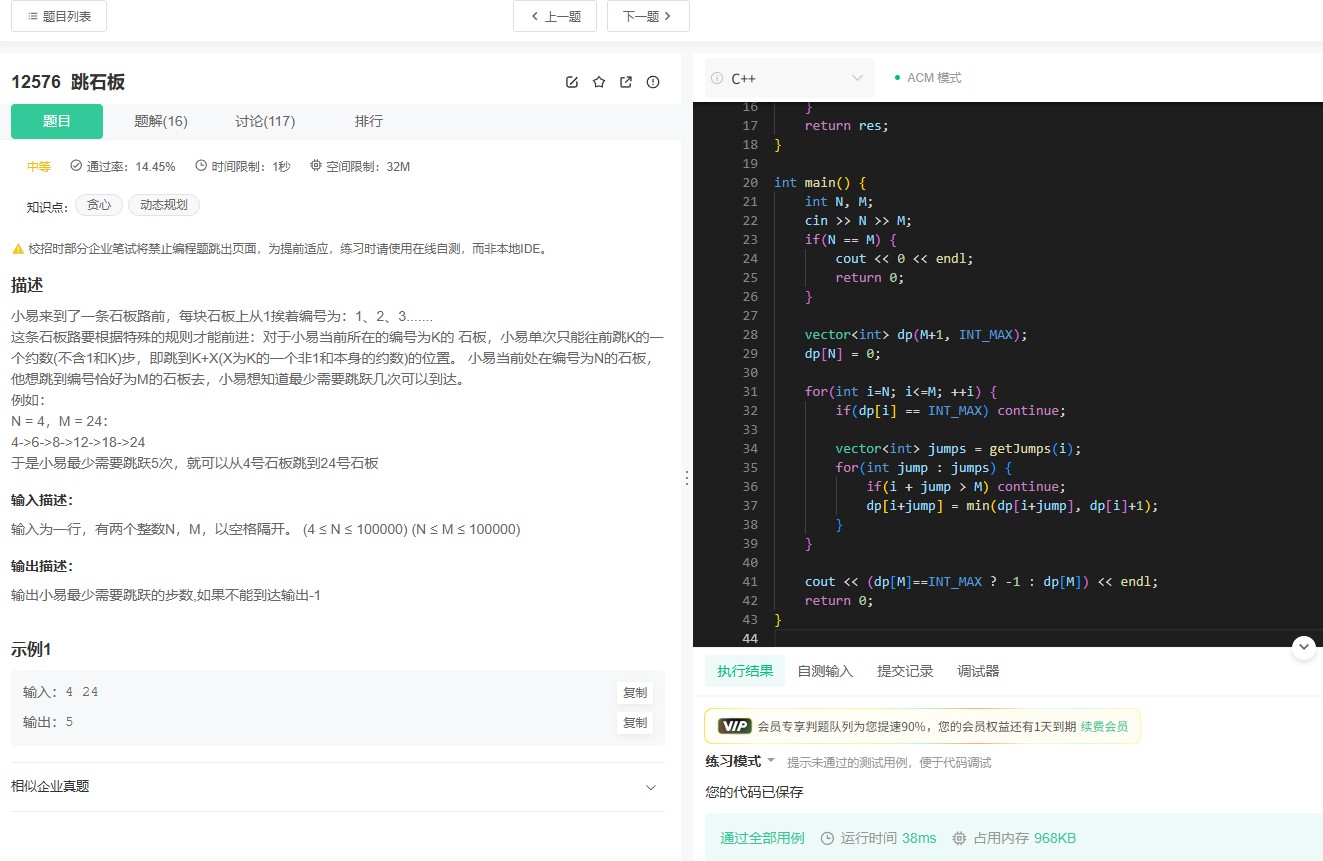
牛客12576题全解析:动态规划+质因数分解解决跳跃问题
一、题目解读牛客12576题是一道经典的算法题,要求给定起点N和终点M,求解从N到M的最少跳跃次数。题目考察的核心在于路径优化与动态规划思想,需结合数论中的质因数分解技巧,通过合理设计算法降低时间复杂度,避免暴力枚举的指数级耗时。二、解题思路采用“动态规划
深度学习
•
8个月前
洛谷P2034题解:动态规划+单调队列优化求解最大K段子段和问题
一、题目解读洛谷P2034题目要求给定一个长度为n的整数数组,将其分成不超过k段,求各段和的最大值。该问题属于经典动态规划问题的扩展,需结合优化技巧高效求解。二、解题思路采用动态规划单调队列优化的策略。核心思想是定义状态dp
深度学习
•
8个月前
动态规划进阶:牛客4802题带附件背包问题详解 | 组合优化技巧
一、问题背景与算法思路牛客4802题是一个典型的带附件的背包问题变种,要求在主件和附件存在依赖关系的情况下,选择物品组合使总价值最大化。本文通过动态规划方法,将问题转化为分组背包问题,通过预处理所有可能的组合方式来实现高效求解。二、完整代码实现(带详细注释
1
2
3
•••
30