
图像的阈值化就是利用图像像素点分布规律,设定阈值进行像素点分割,进而得到图像的二值图像。图像阈值化操作有多种方法,常用方法有经典的OTSU、固定阈值、自适应阈值、双阈值及半阈值化操作。这里对各种阈值化操作进行一个总结。
OTSU阈值化
在阈值化处理中,常用的算法就是OTSU。发明人是Nobuyuki Ostu。这种二值化操作阈值的选取非常重要,阈值选取的不合适,可能得到的结果就毫无用处。简单的说,这种算法假设衣服图像由前景色和背景色组成。通过统计学的方法来选取一个阈值,使这个阈值可以将前景色和背景色尽可能分开。 我们知道一幅灰度图像,可以计算它的颜色平均值,或者更进一步,可以计算出灰度直方图。我们可以把这幅图的灰度平均值为M,任意选取一个灰度值t,则可以将这个直方图分成前后两部分。我们称这两部分分别为A和B,对应的就是前景色和背景色。这两部分各自的平均值为$ M_0 $和$ M_1 $。A部分里的像素站总像素数的比例为$ p_0 $,B部分里的像素数站总像素数的比例为$ p_1 $。Nobuyuki Ostu给出的类间方差定义为: $$ ICV = p_0*(M_0 - M)^2 + p_1*(M_1 - M)^2\tag 1) $$ 展开后如下: $$ p_0 M_0^2 - 2p_0M_0M+p_0M^2+ p_1M_1^2-2p_1M_1M+P_1M^2 $$ 又: $$ p_0 + p_1 = 1,p_0M_0 + p_1M_1 = M $$ 带入(1)得如下: $$ p_0p_1(M_0-M_1)^2 $$ 其实现代码如下:
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <string>
#include <cmath>
using namespace cv;
int Otsu(Mat matSrc)
{
if (CV_8UC1 != matSrc.type())
return -1;
int nCols = matSrc.cols;
int nRows = matSrc.rows;
int nPixelNum = nCols * nRows;
// 初始化
int pixelNum[256];
double probability[256];
for (int i = 0; i < 256; i++)
{
pixelNum[i] = 0;
probability[i] = 0.0;
}
// 统计像素数和频率
for (int j = 0; j < nRows; j++)
{
for (int i = 0; i < nCols; i++)
{
pixelNum[matSrc.at<uchar>(j, i)]++;
}
}
for (int i = 0; i < 256; i++)
{
probability[i] = (double)0.1*pixelNum[i] / nPixelNum;
}
// 计算
int nThreshold = 0; // 最佳阈值
double dMaxDelta = 0.0; // 最大类间方差
double dMean_0 = 0.0; // 左边平均值
double dMean_1 = 0.0; // 右边平均值
double dDelta = 0.0; // 类间方差
double dMean_0_temp = 0.0; // 左边平均值中间值
double dMean_1_temp = 0.0; // 右边平均值中间值
double dProbability_0 = 0.0; // 左边频率值
double dProbability_1 = 0.0; // 右边频率值
for (int j = 0; j < 256; j++)
{
for (int i = 0; i < 256; i++)
{
if (i < j)// 前半部分
{
dProbability_0 += probability[i];
dMean_0_temp += i * probability[i];
}
else // 后半部分
{
dProbability_1 += probability[i];
dMean_1_temp += i * probability[i];
}
}
// 计算平均值
// fMean_0_teamp计算的是前半部分的灰度值的总和除以总像素数,
// 所以要除以前半部分的频率才是前半部分的平均值,后半部分同样
dMean_0 = dMean_0_temp / dProbability_0;
dMean_1 = dMean_1_temp / dProbability_1;
dDelta = (double)(dProbability_0 * dProbability_1 * pow((dMean_0 - dMean_1), 2));
if (dDelta > dMaxDelta)
{
dMaxDelta = dDelta;
nThreshold = j;
}
// 相关参数归零
dProbability_0 = 0.0;
dProbability_1 = 0.0;
dMean_0_temp = 0.0;
dMean_1_temp = 0.0;
dMean_0 = 0.0;
dMean_1 = 0.0;
dDelta = 0.0;
}
return nThreshold;
}
测试代码如下:
int main()
{
std::string strPath = "D:\\MyDocuments\\My Pictures\\OpenCV\\";
Mat matSrc = imread(strPath + "shrimp.jpg");
if (matSrc.empty())
return -1;
int nCols = matSrc.cols;
int nRows = matSrc.rows;
Mat matGray;
cvtColor(matSrc, matGray, CV_BGR2GRAY);
imshow("gray", matGray);
int nOstuThreshold = Otsu(matGray);
std::cout << nOstuThreshold << std::endl;
Mat matOstu = Mat::zeros(matGray.rows, matGray.cols, CV_8UC1);
// 用得到的值进行二值化处理
for (int j = 0; j < nRows; j++)
{
for (int i = 0; i < nCols; i++)
{
if (matGray.at<uchar>(j, i) < nOstuThreshold)
{
// matOstu.at<uchar>(j, i) = matGray.at<uchar>(j, i);
matOstu.at<uchar>(j, i) = matGray.at<uchar>(j, i);
}
else
{
// matOstu.at<uchar>(j, i) = matGray.at<uchar>(j, i);
matOstu.at<uchar>(j, i) = 0;
}
}
}
imshow("ostu", matOstu);
imwrite(strPath + "ostu.jpg", matOstu);
waitKey();
return 0;
}
原图:  阈值处理后:
阈值处理后: 
固定阈值化
OpenCV中提供了阈值化函数threshold,该函数有5中阈值化类型参数。简单说就是用一个固定阈值来分割图像。至于分割方式有多种。分别对应不同的阈值化方式。其函数原型如下:
double threshold(InputArray src, OutputArray dst, double thresh, double maxval, int type)
参数src表示原图像数组(单通道,8位或32位浮点数据);dst表示输出图像组;thresh表示阈值大小;maxval表示预设最大值(THRESH_BINARY或THRESH_BINARY_INV时有用);type表示阈值化处理的类型设置。type的各种类型如下:
THRESH_BINARY二进制阈值化
将灰度值大于thresh的设置为maxval,不大于thresh设置为0。灰度计算式如下: $$dst(x, y) = \begin{cases} maxval&src(x, y)>thresh\ 0&otherwise \end{cases}$$
THRESH_BINARY_INV反二进制阈值化
将灰度值大于thresh的设置为0,不大于thresh设置为maxval。灰度计算式如下: $$dst(x, y) = \begin{cases} maxval&src(x, y)\leq thresh\ 0&otherwise \end{cases}$$
THRESH_TRUNC截断阈值化
将灰度值大于thresh的设置为threshold,不大于thresh的灰度值不变。灰度计算式如下: $$dst(x, y) = \begin{cases} threshold &src(x, y)> thresh\ src(x, y)&otherwise \end{cases}$$
THRESH_TOZERO阈值化为0
将灰度值大于thresh的不变,不大于thresh的灰度值设置为0。灰度计算式如下: $$dst(x, y) = \begin{cases} src(x, y) &src(x, y)> thresh\ 0&otherwise \end{cases}$$
THRESH_TOZERO_INV反阈值化为0
将灰度值大于thresh的不变,不大于thresh的灰度值设置为0。灰度计算式如下: $$dst(x, y) = \begin{cases} src(x, y) &src(x, y)\leq thresh\ 0&otherwise \end{cases}$$ 试例代码如下:
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <string>
#include <cmath>
using namespace cv;
int main()
{
std::string strPath = "D:\\MyDocuments\\My Pictures\\OpenCV\\";
Mat matSrc = imread(strPath + "shrimp.jpg");
Mat matGray, matThresh;
cvtColor(matSrc, matGray, CV_BGR2GRAY);
threshold(matGray, matThresh, 156, 255, CV_THRESH_TOZERO_INV);
imshow("gray", matGray);
imshow("thresh", matThresh);
imwrite(strPath + "thresh.jpg", matThresh);
waitKey();
return 0;
}
原图:  阈值处理后的图:
阈值处理后的图: 
自适应阈值化
在图像阈值化操作中,我们更关心的是从二值化图像中分离目标区域和背景区域,仅仅通过固定阈值很难达到理想的分割效果。在图片中的灰度是不均匀的,所以通常情况下图片中不同区域的阈值时不一样的。在不同局部选取阈值的方法有多种。在OpenCV中实现了两种方法:1)局部邻域块的均值;2)局部邻域块的高斯加权和。其函数原型如下:
void adaptiveThreshold(InoutArray src, OutputArray dst, double maxValue, int adaptiveMethod, int thresholdType, int blockSize, double C)
src表示源图像数组;
dst表示输出图像组;
maxValue表示预设满足条件最大值;
adaptiveMethod表示自适应阈值算法选择ADAPTIVE_THRESH_MEAN_C或ADAPTIVE_THRESH_GAUSSIAN_C;
ADAPTIVE_THRESH_MEAN_C的计算方法是计算出邻域的平均值再减去第七个参数double C的值
ADAPTIVE_THRESH_GAUSSIAN_C的计算方法是计算出邻域的高斯均匀值再减去第七个参数double C的值
thresholdType表示阈值类型THRESH_BINARY或THRESH_BINARY_INV;
blockSize表示邻域块大小,用来计算区域阈值,一般选择3、5、7......;
参数C表示常数,它是一个从均匀或加权均值提取的常数,可以是负数。 试例代码如下:
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <string>
#include <cmath>
using namespace cv;
int main_adaptive()
{
std::string strPath = "D:\\MyDocuments\\My Pictures\\OpenCV\\";
Mat matSrc = imread(strPath + "panda.jpg");
Mat matGray, matAdaptive;
cvtColor(matSrc, matGray, CV_BGR2GRAY);
// adaptiveThreshold(matGray, matAdaptive, 255, ADAPTIVE_THRESH_MEAN_C, THRESH_BINARY_INV, 5, 5);
adaptiveThreshold(matGray, matAdaptive, 255, ADAPTIVE_THRESH_GAUSSIAN_C, THRESH_BINARY_INV, 5, 5);
imshow("gray", matGray);
imshow("adaptive", matAdaptive);
imwrite(strPath + "adaptive.jpg", matAdaptive);
waitKey();
return 0;
}
原图: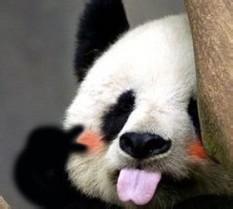 阈值处理后的图:
阈值处理后的图:








