推荐
专栏
教程
课程
飞鹅
本次共找到10000条
python机器学习库
相关的信息
Wesley13
•
4年前
gradle配置本地mavn仓库 mavenLocal() 时的bug
最近在学习Gradle,在配置maven仓库时遇到一个很奇怪的问题。因为之前已经在自己机器上下载了一些maven的本地缓存,所有在使用gradle时想优先从本地的仓库中下载jar,查看了官方的userguide文档,发现其中有这么一段:大概意思是说使用mavenLocal()配置maven的本地仓库后,gradle默认会按以下顺序去查找本地的仓库
Irene181
•
4年前
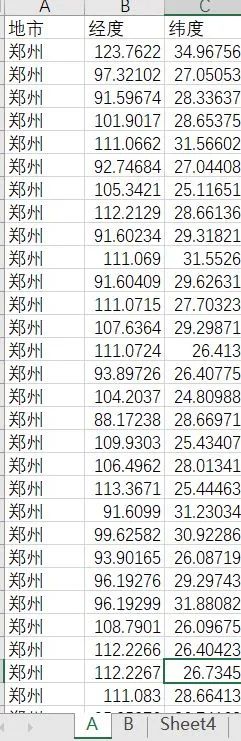
手把手教你用Python替代Mapinfo更快查找两张表中距离最近的点
一、前言大家好,我是崔艳飞。工作中有时需要把A表中的经纬度点,从B表中匹配一个最近的点出来,用Mapinfo也可以实现,但处理速度慢,特别是数据量大时根本处理不动,此时用Python就能轻松实现,还能显示处理进度,详细如下。二、项目目标用Python实现两张表间最近点的计算。三、项目准备软件:PyCharm需要的库:pandas,xlrd,os
CuterCorley
•
4年前
商业数据分析从入门到入职(9)Python网络数据获取
@toc前言本文主要讲Python最常见的应用之一——网络数据获取,即爬虫:先介绍了网页和网络的基础知识,为从网页中获取数据打好基础;接下来以两个案例介绍从网络中获取数据和处理数据的不同方式,以进一步认识Python爬虫和数据处理。一、网络和网页基础知识1.数据来源数据源有很多,可以从数据库中获取,可以从文件中获取,也可以从
Stella981
•
4年前
Python源码在Win下和Linux下的编译,C++调用Python库绘制等高线
目录前言Python源码以及VS2017的准备Python源码VS2017Windows下编译Python源码编译命令编译步骤编译后的配置添加注册表Win10中编译Python源码小结Windows中C调用Python代码绘制等高线图CMakeLists.txt文件如下:Python代码如下:CPP文件:
Stella981
•
4年前
Python进阶丨如何创建你的第一个Python元类?
摘要:通过本文,将深入讨论Python元类,其属性,如何以及何时在Python中使用元类。Python元类设置类的行为和规则。元类有助于修改类的实例,并且相当复杂,是Python编程的高级功能之一。通过本文,将深入讨论Python元类,其属性,如何以及何时在Python中使用元类。本文介绍以下概念:什么是Python元类?
Stella981
•
4年前
Linux服务器时间同步
导读Linux服务器运行久时,系统时间就会存在一定的误差,一般情况下可以使用date命令进行时间设置,但在做数据库集群分片等复杂操作时对多台机器的时间差是有要求的,此时就需要使用ntpdate进行时间同步。Linux时间的操作的常见命令date命令使用方式:date\u\\ddatestr\\
Stella981
•
4年前
Python3.6实现12306火车票自动抢票,附源码
Python(发音:英\?pa?θ?n\,美\?pa?θɑ:n\),是一种面向对象、直译式电脑编程语言,也是一种功能强大的通用型语言,已经具有近二十年的发展历史,成熟且稳定。它包含了一组完善而且容易理解的标准库,能够轻松完成很多常见的任务。它的语法非常简捷和清晰,与其它大多数程序设计语言不一样,它使用缩进来定义语句。Python支持命令式程序设计
Wesley13
•
4年前
Java的特点之一——与平台无关
Java出现之前,C和C是当时广泛使用的编程语言。但是C和C都有一个共同的缺点,那就是只能在特定的平台进行编译。这里指的平台是由操作系统(OS)和处理器(CPU)构成的。C和C源程序所在的特定平台对其源文件进行编译、连接,生成当前平台的机器指令(平台的机器指令可以被该平台直接识别和执行),根据当前平台的机器指令生成可执
Stella981
•
4年前
Linux[命令]
系统信息arch显示机器的处理器架构(1)unamem显示机器的处理器架构(2)unamer显示正在使用的内核版本dmidecodeq显示硬件系统部件(SMBIOS/DMI)hdparmi/dev/hda罗列一个磁盘的架构特性hdparmtT/dev/sda在磁盘上
1
•••
82
83
84
•••
1000