推荐
专栏
教程
课程
飞鹅
本次共找到817条
路径规划
相关的信息
Wesley13
•
4年前
ROS机器人路径规划介绍
ROS机器人路径规划算法主要包括2个部分:1)全局路径规划算法;2)局部路径规划算法;一、全局路径规划 globalplannerROS的navigation官方功能包提供了三种全局路径规划器:carrot\_planner、global\_planner、navfn,默认使用的是navfn,其中:1、carrot\_planner参
咕咕鸡
•
3年前
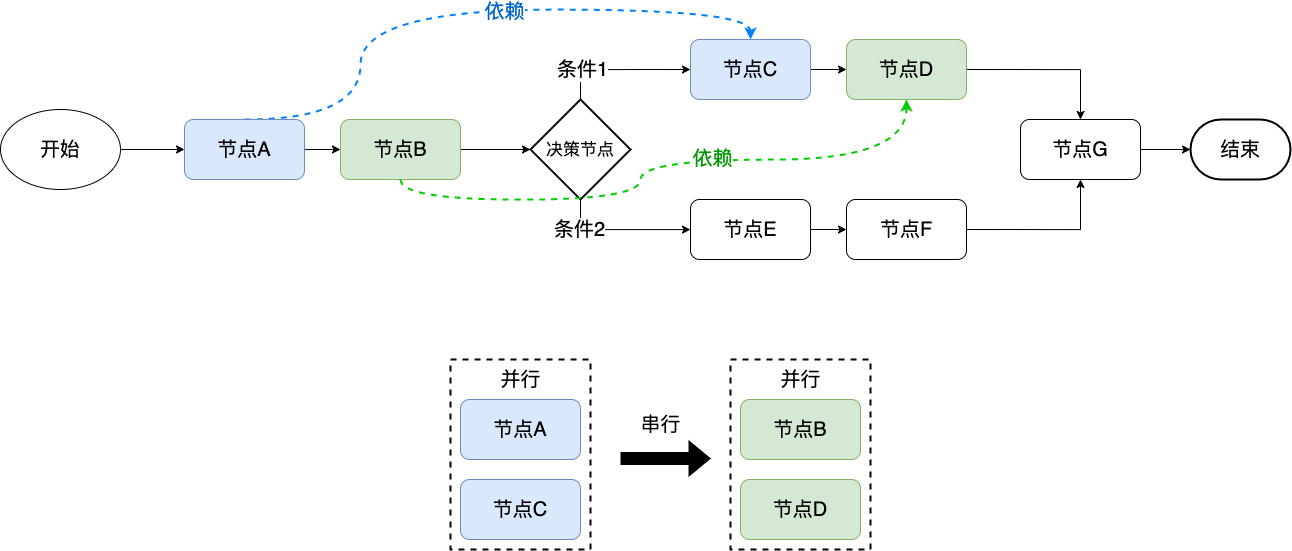
风控决策引擎——决策流路径规划
引言决策引擎服务是风控系统的大脑,承载着风控策略编排和计算的任务,对决策的时耗和精度有着严格的要求,本文以决策流执行路径实现方案为切入点,一窥风控决策引擎高效的原理。<!more背景在上文
Kubrnete
•
4年前
基于01背包问题的动态规划算法
目录初步认识动态规划(初步认识动态规划)与动态规划有关的理论知识:(与动态规划有关的理论知识:)动态规划中的最优决策表(基于填表的动态规划算法)最终版动态规划(最终版动态规划)总结(总结:)初步认识动态规划动态规划算法是通过拆分问题,定义问题状态和状态之间的关系,使得问题能够以递推
Stella981
•
4年前
Ganglia的安装配置
监控节点需要安装的软件:GangliaGangliawebPhpApache被监控节点需要安装的软件Ganglia安装路径规划:软件名称路径ganglia安装路径/usr/local/gangliaphp安装路径/usr/loca
Stella981
•
4年前
Linux环境下安装weblogic10.3.2
配置准备:Hbase安装配置规划机器192.168.169.138(本机虚拟机)系统RedHatEnterpriseLinuxServerrelease6.4(Santiago) 系统内核2.6.32358.el6.x86\_64安装包weblogic.zip路径zip包路径:
Wesley13
•
4年前
411,动态规划和递归求不同路径 II
!(https://oscimg.oschina.net/oscnet/ab5b3584e82b33b11b46a2c4672f398dd49.png)Ifyou'renotsatisfiedwiththelifeyou'reliving,don'tjustcomplain.Dosomethingaboutit.
Stella981
•
4年前
Dijkstra算法
引言Dijkstra算法主要应用在寻找带正边权的图中顶点之间的最短路径。这种例子在生活中非常多,比如导航软件自动规划路径,路径最短或用时最少的路径总是作为最优路径返回给你;又比如我大天朝最常见的找人办事,有的时候我们没法直接找到可以帮忙的人,就需要再找别人帮忙,又或者关系不够铁,找人花的代价很大,我们总是潜意识里找关系最铁并中转最少的人去帮忙。
贾蔷
•
8个月前
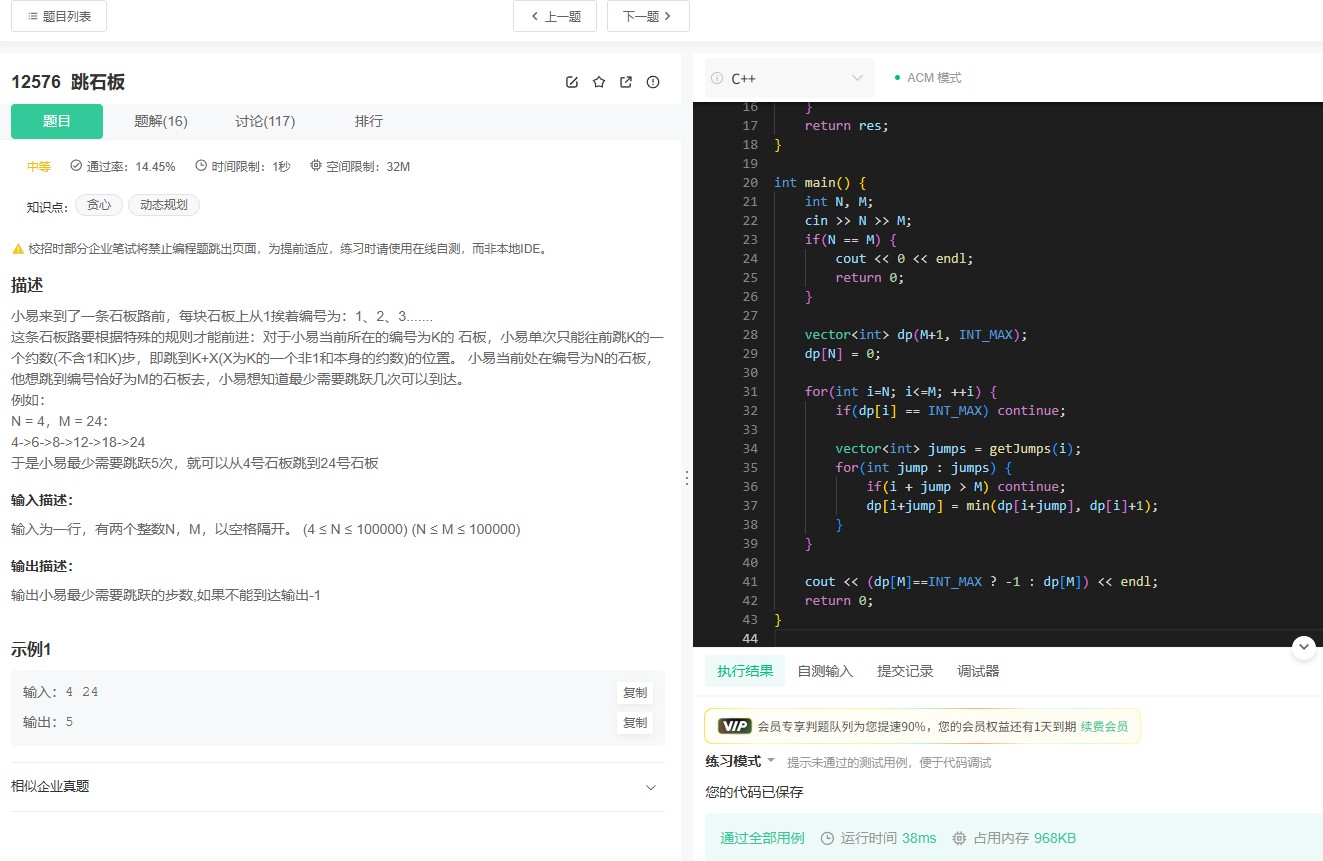
牛客12576题全解析:动态规划+质因数分解解决跳跃问题
一、题目解读牛客12576题是一道经典的算法题,要求给定起点N和终点M,求解从N到M的最少跳跃次数。题目考察的核心在于路径优化与动态规划思想,需结合数论中的质因数分解技巧,通过合理设计算法降低时间复杂度,避免暴力枚举的指数级耗时。二、解题思路采用“动态规划
贾蔷
•
8个月前
2023年GESP六级题解:洛谷P10108闯关游戏动态规划解法详解
一、题目解读本文针对2023年GESP六级题目“闯关游戏”(洛谷P10108)进行详细解析。题目要求玩家通过不同关卡路径选择,计算从起点到终点的最大得分。关卡间存在跳跃规则,需结合动态规划思想设计高效算法,最终输出最优得分。二、解题思路采用动态规划(Dyn
GeorgeGcs
•
8个月前
【HarmonyOS】鸿蒙应用实现调用系统地图导航或路径规划
鸿蒙开发能力HarmonyOSSDK应用服务鸿蒙金融类应用(金融理财前言在涉及地图业务中,调用地图导航和路径规划是三方应用中较为常见的功能。若只是子业务需要地图导航效果,整个APP内部集成地图去实现导航或者路径规划,会造成SDK集成冗余。毕竟很重。所以该效
1
2
3
•••
82