IP地理位置定位系统是一个街道级别的、实时的IP地理位置查询系统。该系统采用超高精度IP实时定位技术,通过网络测量和大数据挖掘,对IP的地理位置和相关属性进行测量,在无需硬件支持的条件下,即可对被探测目标终端IP完成定位。
定位系统的研发核心是IP地理位置定位算法,包含如何划分IP所属功能块和地域块、设计IP定位算法、采用什么样的相似度比较策略、IP地理位置定位返回哪些相关信息、对IP定位结果的信心度进行描述、定义IP定位的精度准确度和精密度、对IP定位的正确性进行评估、IP定位结果进行展示模型、以什么形式给客户提供IP定位服务等。
定位系统是以企业法人王永博士的科技论文《街道级别的无需客户端支持的IP地理定位系统》为基础的自主研发项目,该论文发表于世界最高档次网络系统会议NSDI当中,并已经在多个地区和国家完成实施开发,技术完全可行。该定位技术包含功能块和地域块划分、实时网络测量两个方面。
功能块和地域块划分
根据IP分配的区域特性,首先,我们以APNIC和应用场景将IP块进行功能划分,将IP块分成9类功能块,分别是学校单位、数据中心、住宅用户、企业专线、组织机构、基础设施、移动网络、公共热点和卫星通讯;其次,对每一个功能块,按地域分布进行地域块划分。功能块是指具有相同应用场景的IP块(IP连续),地域块是指同一功能块下,拥有相同地理位置的IP块(IP连续)。
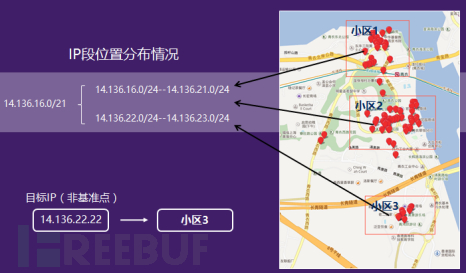 图1.1.4 IP地域块划分的应用示例
图1.1.4 IP地域块划分的应用示例
如图1.1.4所示,是IP地域块划分的应用示例,右侧地图是香港地区的一张部分地图,红点表示定位系统中基准点所在的位置。针对香港宽频的住宅用户IP段14.136.22.0/21,我们研究发现,其前6个IP块分布在小区1和小区2,其后两个IP块分布在小区3。也就是说,功能块14.136.22.0/21被划分为2个地域块14.136.16.0/24-14.136.21.0/24和14.136.22.0/24-14.136.23.0/24。那么,如果有目标IP(14.136.22.22),即使是非基准点,我们也可以把它定位到小区3,小区3的直径为1公里,我们此次定位的最大误差距离也就是1公里。如果目标IP被定位到小区1和小区2,我们可以通过实时网络测量的方法,确定目标IP是在小区1还是在小区2。
实时网络测量
如图1.1.5所示,当用户输入目标IP,首先,定位系统把目标IP发送给中心服务器(G);其次,中心服务器把目标IP分发给一组探测服务器(1-8),探测服务器对其进行实时网络信息测量,并把测量结果返回给中心服务器;然后,定位算法对目标IP与基础数据中IP的网络相似度进行分析,将目标IP与基础数据中某个IP进行绑定;最后,将定位结果返还给用户,完成定位。
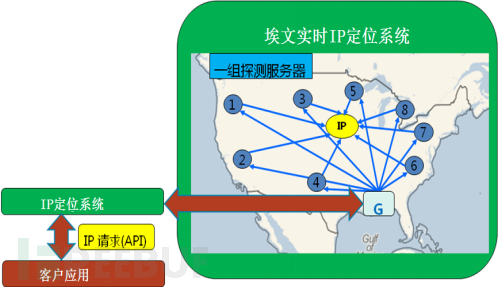 图1.1.5 定位系统研发的基本原理图
图1.1.5 定位系统研发的基本原理图
本文同步分享在 博客“郑州埃文科技”(FreeBuf)。
如有侵权,请联系 support@oschina.cn 删除。
本文参与“OSC源创计划”,欢迎正在阅读的你也加入,一起分享。