
Android 常见传感器

最终我们要实现这些: 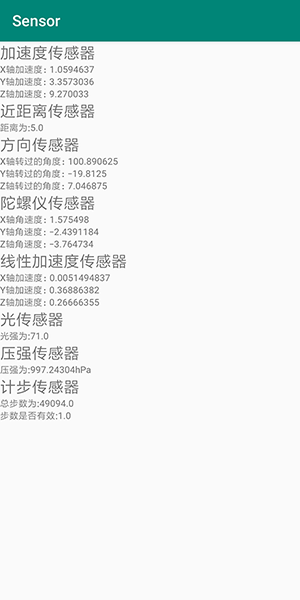
源码看这里: 项目源码
在这之前,我们需要了解关于Android的坐标系: 对于大多数传感器来说,坐标系统是相对于设备屏幕来说的。
当一个设备被放在其默认的方向上时,X轴是水平指向右的,Y轴是垂直向上的,Z轴是指向屏幕正面之外的,即屏幕背面是Z的负值。 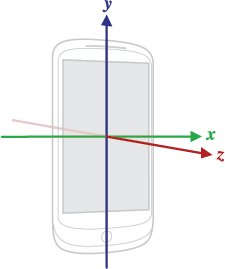
首先,让Activity实现SensorEventListener接口(实现接口需要复写onSensorChanged,onAccuracyChanged方法),便于监听来刷新数据 然后创建SensorManager对象,然后为它注册加速度传感器监听器
//获取系统服务
sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
// 注册事件
// * 参数1 :SensorEventListener监听器
// * 参数2 :Sensor 一个服务可能有多个Sensor实现,此处调用getDefaultSensor获取默认的Sensor
// * 参数3 :模式 可选数据变化的刷新频率,多少微秒取一次。
sensorManager.registerListener(this, sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER),
SensorManager.SENSOR_DELAY_NORMAL);
加速度传感器(Accelerometer)
TYPE_ACCELEROMETER
在**onSensorChanged()**方法中写入判断语句,以下判断语句均写在这个方法内。
public void onSensorChanged(SensorEvent event) {
//加速度传感器
if (event.sensor.getType() == Sensor.TYPE_ACCELEROMETER) {
float x = event.values[0];
float y = event.values[1];
float z = event.values[2];
tvaccelerometer_x.setText("X轴加速度:" + x);
tvaccelerometer_y.setText("Y轴加速度:" + y);
tvaccelerometer_z.setText("Z轴加速度:" + z);
}
}
距离传感器(Proximity)
TYPE_PROXIMITY
//距离传感器
if (event.sensor.getType() == Sensor.TYPE_PROXIMITY) {
float x = event.values[0];
tvproximity.setText("距离为:" + x);
}
方向传感器(Orientation)
TYPE_ORIENTATION
//方向传感器
if (event.sensor.getType() == Sensor.TYPE_ORIENTATION) {
float x = event.values[0];
float y = event.values[1];
float z = event.values[2];
orientation_x.setText("X轴转过的角度:" + x);
orientation_y.setText("Y轴转过的角度:" + y);
orientation_z.setText("Z轴转过的角度:" + z);
}
X:方位角,手机绕着Z轴旋转的角度。0表示正北(North),90表示正东(East), 180表示正南(South),270表示正西(West)。假如values[0]的值刚好是这四个值的话, 并且手机沿水平放置的话,那么当前手机的正前方就是这四个方向,可以利用这一点来 写一个指南针。
Y:倾斜角,手机翘起来的程度,当手机绕着x轴倾斜时该值会发生变化。取值 范围是[-180,180]之间。假如把手机放在桌面上,而桌面是完全水平的话,values1的则应该 是0,当然很少桌子是绝对水平的。从手机顶部开始抬起,直到手机沿着x轴旋转180(此时屏幕 乡下水平放在桌面上)。在这个旋转过程中,values[1]的值会从0到-180之间变化,即手机抬起 时,values1的值会逐渐变小,知道等于-180;而加入从手机底部开始抬起,直到手机沿着x轴 旋转180度,此时values[1]的值会从0到180之间变化。我们可以利用value[1]的这个特性结合 value[2]来实现一个平地尺。
Z:滚动角,沿着Y轴的滚动角度,取值范围为:[-90,90],假设将手机屏幕朝上水平放在 桌面上,这时如果桌面是平的,values2的值应为0。将手机从左侧逐渐抬起,values[2]的值将 逐渐减小,知道垂直于手机放置,此时values[2]的值为-90,从右侧则是0-90;加入在垂直位置 时继续向右或者向左滚动,values[2]的值将会继续在-90到90之间变化。
陀螺仪传感器(Gyroscope)
TYPE_GYROSCOPE
//陀螺仪传感器
if (event.sensor.getType() == Sensor.TYPE_GYROSCOPE) {
float x = event.values[0];
float y = event.values[1];
float z = event.values[2];
//将弧度传化成角度
x = (float) Math.toDegrees(x);
y = (float) Math.toDegrees(y);
z = (float) Math.toDegrees(z);
gyroscope_x.setText("X轴角速度:" + x);
gyroscope_y.setText("Y轴角速度:" + y);
gyroscope_z.setText("Z轴角速度:" + z);
}
原本数据为弧度制,这里转换为角度制,
陀螺仪的XYZ分别代表设备围绕XYZ三个轴旋转的角速度。
线性加速度传感器(LinearAcceleration)
TYPE_LINEAR_ACCELERATION
//线性加速度传感器
if (event.sensor.getType() == Sensor.TYPE_LINEAR_ACCELERATION) {
float x = event.values[0];
float y = event.values[1];
float z = event.values[2];
linearacceleration_x.setText("X轴加速度:" + x);
linearacceleration_y.setText("Y轴加速度:" + y);
linearacceleration_z.setText("Z轴加速度:" + z);
}
就是去掉重力加速度后各个方向的加速度
光传感器(Light)
TYPE_LIGHT
//光传感器
if (event.sensor.getType() == Sensor.TYPE_LIGHT) {
float x = event.values[0];
light.setText("光强为:" + x);
}
感知当前的光强度
压强传感器
TYPE_PRESSURE
//压强传感器
if (event.sensor.getType() == Sensor.TYPE_PRESSURE) {
float x = event.values[0];
pressure.setText("压强为:" + x + "hPa");
}
压力传感器返回当前的压强,单位是百帕斯卡hectopascal(hPa)。
计步传感器
TYPE_STEP_COUNTER————计步器(记录历史步数累加值)
TYPE_STEP_DETECTOR————检测器(检测每次步伐数据)
//计步传感器
if (event.sensor.getType() == Sensor.TYPE_STEP_COUNTER) {
float x = event.values[0];
step_counter.setText("总步数为:" + x);
}
if (event.sensor.getType() == Sensor.TYPE_STEP_DETECTOR) {
float x = event.values[0];
step_detector.setText("步数是否有效:" + x);
}











