
分布式一致性
“分布式” 是大型系统实现高性能、高可用所常用的架构手段,本章节将概述 “分布式一致性”的基本内容,以作为 ZAB 算法阐述的基础。
分布式一致性的基本概念
数据库系统的基础理论中,“事务”必须符合 ACID,即为:Atomicity 原子性、Consistency 一致性、Isolation 隔离性、Durability 持久性,其中:
- Atomicity 原子性:“事务”必须 “全部成功”,或者 “全部失败”,不允许部分成功、部分失败;
- Consistency 一致性:任何 “事务”必须保证数据库约束(主键、外键……)有效。
关于 “分布式一致性”,必须明确,“分布式一致性”的 “一致性”与 ACID 的 “一致性”并不相同,其更多蕴含了 ACID 中 “Atomicity 原子性”的含义。
通俗而言,分布式系统中,每一次 “读”都能获取到 “最后更新”的数据,即为 “分布式一致性”。
特别的,分布式系统中,数据通常以“副本”的形式存在于不同的节点,“分布式一致性”要求:通过任意节点的“数据副本”,都能够获取到“最后更新”的数据,即:对于每一次 “写”,所有节点的“数据副本”都必须完成更新。
分布式一致性类型
为了阐述“分布式一致性”的类型,假设以下场景:
- 存储系统:提供数据的“读”、“写”操作(通常认为是分布式的);
- 客户端 A、B、C:通过“存储系统”进行数据的“读”、“写”,A、B、C 相互独立。
强一致性(Strong Consistency)
任何“写”操作完成,任意的“读”(无论客户端 A、B 或 C),都能够获得“写”操作所写入的数据。
弱一致性(Weak Consistency)
“写”操作完成,除非满足特定的条件,否则不能保证“读”将获得“写”操作所写入的数据。“写”操作完成到“分布式一致性”达成的时间段,称为“不一致时间窗”。
最终一致性(Eventual Consistency)
本质而言,“最终一致性”是一种特殊的“弱一致性”,但通常予以独立区分:如果数据没有新的“写”操作,最终,任意“读”操作将获得最新的值。若没有异常产生,“不一致时间窗”将具有确定的“上限”。
最终一致性的“变种”包括:
- 因果一致性 (Causal Consistency):若客户端 A 将“写”操作“通知”到客户端 B,任意来自客户端 B 的“读”操作,都能够获取“写”操作所写入的数据(不保证客户端 C 的“读”操作);
- “Read-your-writes”一致性(Read-your-writes Consistency):若客户端 A 完成了“写”操作,任意来自客户端 A 的“读”操作,都能够获取“写”操作所写入的数据;
- 会话一致性(Session Consistency):客户端 A 以“会话”的形式进行“存储系统”的“读”/“写”,相同的“会话”中,能够确保 Read-your-writes Consistency(若“会话”出现异常重建,将不保证);
- 单调读一致性(Monotonic Read Consistency):若客户端 A 通过“读”操作获取到数据特定“版本”的值,后续的“读”操作,将确保不会获取到“旧版本”值;
- 单调写一致性(Monotonic Write Consistency):客户端 A 的“写”操作将“顺序地”执行。
CAP 与 BASE
CAP,即为:Consistency、Availability、Partition Tolerance。
- Consistency(一致性)
- Availability(可用性):每一次请求都能够得到响应,并且没有异常;
- Partition Tolerance(分区容错性):“分区”,即分布式系统中,由于网络原因,部分节点与其他节点网络中断,即形成“分区”,“分区容错性”要求,“分区”形成时,系统能够继续提供服务。
CAP 理论强调,分布式系统中,C、A、P 三个要素无法同时满足,仅能够实现其中任意两个。
然而,对于分布式系统而言,P(分区容错性)通常是最基本的要求,关于 C 和 A 必然做出权衡,最常见的方案即为 BASE,Basically Available、Soft state、Eventual consistency:
- Basically Available(基本可用):未知故障出现时,允许损失部分可用性,例如:响应延时增加、部分功能不可用;
- Soft State(弱状态):允许数据存在“中间状态”(例如:网络延时引起分布式不同节点间的数据同步延时),并认为“中间状态”不影响整体服务;
- Eventual Consistency(最终一致性)。
BASE 的核心:不追求“强一致性”,允许结合业务特性,以适当的方式达成“最终一致性”。
ZAB - ZooKeeper Atomic Broadcasting
ZAB 是 ZooKeeper 的核心,是 ZooKeeper 实践 BASE 的精华,其主要负责:
- Leader 选举
- 数据同步
- 事务广播
- 崩溃恢复
ZAB 与 Paxos 算法的非常相似,但 ZAB 基于设计目标,引入了 FIFO 通信(借助 TCP)、全局事务 Id。限于篇幅,本文将不予以讨论。
ZAB 系统模型 & 概念定义
ZAB 系统模型中,节点(peers)集合构成整个系统:
Π={p1,p2,…,pN}Π={p1,p2,…,pN}
关于节点:
- 所有的节点都具有稳定的存储能力;
- 任意节点之间都能够进行通信(消息发送 & 接收);
- 于整体系统运行期间,任意节点都有可能无限次地崩溃或恢复。
特别的,将节点集合 ΠΠ 的子集 QQ 称为 quorum,当且仅当 |Q|>N/2|Q|>N/2。
ZAB 系统模型中,节点集合 ΠΠ 的主(primary) 节点,负责将消息广播到其他所有的节点,并且:
- 任意时间点,最多允许唯一的主节点;
- 一旦主节点崩溃,新的主节点将被“选举”产生。
因此,系统运行,将获得主节点的“序列”:p1p2…pe…p1p2…pe…,ee 即表示 pepe 作为主节点的“时期”(Epoch)。使用 pe≺pe′pe≺pe′ 表示 e<e′e<e′。
ZAB 事务,即表示来自主节点广播的“状态变更”消息,表示为 ⟨v,z⟩⟨v,z⟩:
- vv 表示新的状态;
- zz 表示事务的唯一标示(ZxId,于 ZooKeeper 中,即为 ZxId)。
事务首先由主节点“提议”(Propose),当节点被明确地通知时,事务进行“提交”(Commit)。
ZAB 关键特性
为了保证节点间的一致性,ZAB 必须具备若干关键特性。
首先,节点集合 ΠΠ 的任意两个节点 pipi、pjpj,两者间的通信,必须具备的特性包括:
- 完整性(Integrity):pjpj 接收到来自 pipi 的消息 mm,当且仅当 pipi 向 pjpj 发送了 mm;
- 前置性(Prefix):pipi 向 pjpj 依次发送了消息 mm、m′m′,则 pjpj 将依次接收到消息 mm 和 m′m′。
ZooKeeper 使用 TCP 作为构建节点通信以实现以上特性。
其次,关于事务,必须具备的特性包括:
- Integrity(完整性):若节点提交了事务 ⟨v,z⟩⟨v,z⟩,必定存在进行事务 ⟨v,z⟩⟨v,z⟩广播的节点;
- Total Order(全局顺序性):若节点依次提交了事务 ⟨v,z⟩⟨v,z⟩ 和 ⟨v′,z′⟩⟨v′,z′⟩,则任意提交了事务 ⟨v′,z′⟩⟨v′,z′⟩ 的节点,必须于 ⟨v′,z′⟩⟨v′,z′⟩ 提交前完成 ⟨v,z⟩⟨v,z⟩ 的提交;
- Agreement:若节点 pipi 提交了事务 ⟨v,z⟩⟨v,z⟩,节点 pjpj 提交了事务 ⟨v′,z′⟩⟨v′,z′⟩,则 pipi 提交了 ⟨v′,z′⟩⟨v′,z′⟩ ,或者 pjpj 提交了 ⟨v,z⟩⟨v,z⟩。
此外,关于“主节点顺序性”(Primary Order),必须具备的特性包括:
- 本地“主节点顺序性”(Local Primary Order):若主节点依次广播了 ⟨v,z⟩⟨v,z⟩和 ⟨v′,z′⟩⟨v′,z′⟩,则完成事务 ⟨v′,z′⟩⟨v′,z′⟩ 提交的节点,必须于 ⟨v′,z′⟩⟨v′,z′⟩ 提交前完成 ⟨v,z⟩⟨v,z⟩ 的提交;
- 全局“主节点顺序性”(Global Primary Order):主节点 pipi 广播了事务 ⟨v,z⟩⟨v,z⟩,主节点 pjpj 广播了事务 ⟨v′,z′⟩⟨v′,z′⟩,并且 pi≺pjpi≺pj,若节点提交了 ⟨v,z⟩⟨v,z⟩和 ⟨v′,z′⟩⟨v′,z′⟩,则 ⟨v,z⟩⟨v,z⟩ 的提交必须位于 ⟨v′,z′⟩⟨v′,z′⟩ 前;
- 主节点完整性(Primary Integrity):主节点 pepe 广播了事务 ⟨v,z⟩⟨v,z⟩,若任意节点提交了事务 ⟨v′,z′⟩⟨v′,z′⟩,并且 ⟨v′,z′⟩⟨v′,z′⟩ 由 pe′pe′ 广播,pe′≺pepe′≺pe,则广播事务 ⟨v,z⟩⟨v,z⟩ 前,主节点 pepe 必须完成 ⟨v′,z′⟩⟨v′,z′⟩ 提交。
ZAB 算法
ZAB 中,节点可能位于以下状态:
- leading:主节点(亦称为 Leader),负责事务广播;
- following:节点作为 Follower;
- election:正在进行“主节点选举”。
ZAB 共计包括 4 个阶段,由节点依次执行:
- #0:主节点选举 (Leader Election),节点位于 election 状态时执行;
- #1:发现 (Discovery);
- #2:同步 (Synchronization):阶段 #1 与 #2 的意义即为实现节点之间一致的状态;
- #3:广播 (Broadcast):若无故障产生,节点将最终停留于阶段 #3。本阶段,最多允许 1 个节点位于 leading 状态。
开始了解 ZAB 各个阶段之前,若干事项必须明确。首先,关于 ZAB 事务标示 ⟨e,c⟩⟨e,c⟩,ee 即为 epoch,cc 即为 epoch 内的计数。
其次,ZAB 关于节点间消息类型的定义。
- FOLLOWERINFO:阶段 #1,Follower 向 Leader 发送信息(acceptedEpoch)的消息类型;
- NEWEPOCH/ACKEPOCH:阶段 #1,Follower 与 Leader 关于 epoch 协商的消息类型;
- NEWLEADER/ACKNEWLEADER:阶段 #2,Follower 与 Leader 关于“Leader”确认的消息类型;
- PROPOSE/ACK/COMMIT:正常提供服务时,关于事务的消息类型。
再次,关于节点需要持久化的数据:
- history:节点事务日志;
- acceptedEpoch:最新 NEWEPOCH 消息的 epoch;
- currentEpoch:最新 NEWLEADER 消息的 epoch;
- lastZxid:事务日志中最新的 ZxId。
ZAB 算法假设:能够检测事务日志中的事务是否完成提交。
阶段 #0,主节点选举(Leader election)
主节点选举,作为“选举”,所有的节点参与“投票”,“票数过半”(即获得 quorum 的“投票”)的节点即为主节点。
若节点 pp“投票”节点 p′p′,p′p′ 即成为 pp 的 prospective Leader,仅当进入阶段 #3,prospective Leader 才能成为主节点(对于节点 pp,称为 Established Leader)。
若节点 pp“投票”节点 pp 自身,则进入 leading 状态;否则,进入 following 状态,成为 Follower。
需要说明:ZAB 协议没有限定“主节点选举算法”,ZooKeeper 实现中,使用了称为 ZooKeeper FLE(Fast Leader Election)的算法,限于篇幅,本文不予以展开讨论。
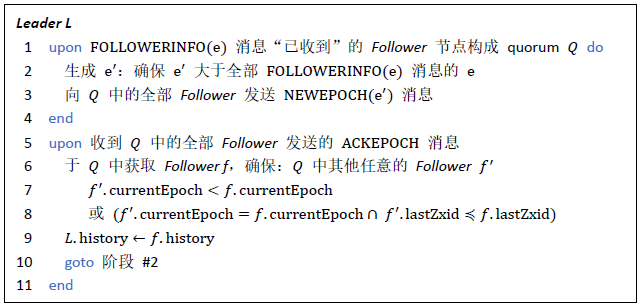
阶段 #1,发现(Discovery)
本阶段目标:获取 quorum 中最新的事务日志,并建立新的 epoch。
Follower 伪代码如下:

伪代码所示,节点 pp 与其 prospective Leader 建立连接,若其 prospective Leader 没有位于 leading 状态,将拒绝连接,节点 pp 将重新进入阶段 #0.
Leader 伪代码如下:
阶段 #2,同步(Synchronization)
本阶段目标:使用阶段 #0 获得的事务日志,于节点间实现数据同步。
Follower 伪代码如下:

Leader 伪代码如下:
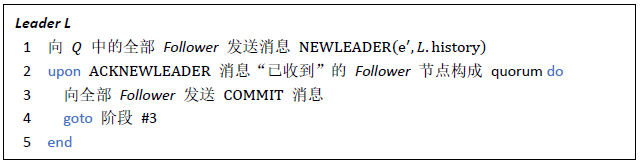
伪代码所示,本阶段:
- Leader 广播其事务日志;
- 若 Leader 广播的事务日志比 Follower 自身事务日志“新”,则 Follower 确认;
- 当 Leader 获得的确认的 Follower 节点达到 quorum,Leader 要求已确认的 Follower 提交事务。
阶段 #2 完成,Leader 正式确认。
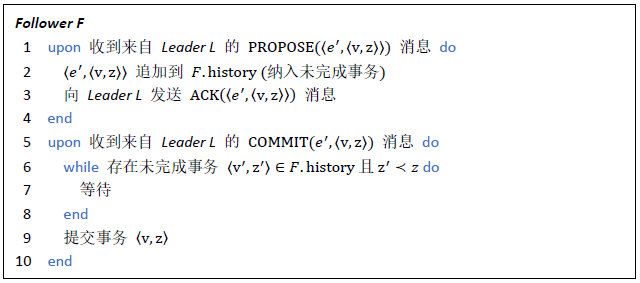
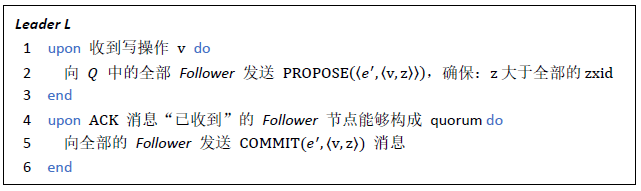
阶段 #3,广播(Broadcast)
本阶段,系统正常提供服务,当客户端提交“写”操作,Leader 广播事务,当获得 quorum 的确认,则提交事务。
同时,本阶段支持新的 Follower 加入。
Follower 伪代码如下:
Leader 伪代码如下:
附加说明,ZAB 于 Leader 和 Follower 建立“心跳机制”,出现以下情况,节点切换到 election 状态,重新进入阶段 #0:
- 若 Leader 获得心跳的节点无法构成 quorum;
- 若 Follower 无法获得 Leader 心跳。
ZooKeeper 数据模型 & 存储
ZooKeeper 将 ZNode 作为基础的数据结构,本章节将阐述 ZooKeeper 数据模型、数据快照以及事务日志。
ZNode 模型
ZooKeeper 使用 DataNode、DataTree、ZKDatabase 构建 ZNode 树状模型:
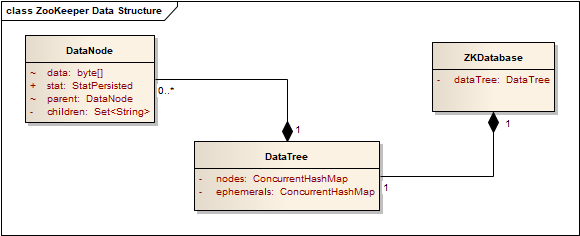
- DataNode
DataNode 作为 ZNode 的基础单元,存储字节数组类型的数据、ZNode Stat、ACL 信息,以及 ZNode 父级 ZNode 的 DataNode 引用、子级 ZNode Path 集合。
- DataTree
DataTree 使用 ConcurrentHashMap 保存全部的 DataNode,其中:ZNode Path 即为 Key。需要说明:“临时”(Ephemeral)ZNode 使用独立的 ConcurrentHashMap。
此外,DataTree 承载了 Watch 相关的数据。
- ZKDatabase
ZKDatabase 承载了 DataTree,同时,负责:会话管理、数据快照以及事务日志。
数据快照
数据快照,顾名思义,ZooKeeper 将全量内存数据,落地于磁盘。
ZooKeeper 配置包含了 dataDir 配置项,默认情况,数据快照存储于 dataDir 中的 version-2 路径:
- 日志文件以 snapshot 作为前缀;
- 日志文件以 16 进制数作为后缀,即生成数据快照时,最新的 ZxId。
需要说明:version-2 的 2 代表了数据快照格式的版本(未来,若 ZooKeeper 进行数据快照格式的升级,路径名称即发生变化)。
数据快照格式
ZooKeeper 内置了“数据快照格式化输出”工具,以查看日志文件 /data/svr/version-2/snapshot.7 作为示例:
java -cp zookeeper-3.4.11.jar:lib/log4j-1.2.16.jar:lib/slf4j-log4j12-1.6.1.jar:lib/slf4j-api-1.6.1.jar org.apache.zookeeper.server.SnapshotFormatter ~/zookeeper/svr/version-2/snapshot.7
格式化的数据快照内容示例:
ZNode Details (count=4):
----
/
cZxid = 0x00000000000000
ctime = Thu Jan 01 08:00:00 CST 1970
mZxid = 0x00000000000000
mtime = Thu Jan 01 08:00:00 CST 1970
pZxid = 0x00000000000000
cversion = 0
dataVersion = 0
aclVersion = 0
ephemeralOwner = 0x00000000000000
dataLength = 0
----
/zookeeper
cZxid = 0x00000000000000
ctime = Thu Jan 01 08:00:00 CST 1970
mZxid = 0x00000000000000
mtime = Thu Jan 01 08:00:00 CST 1970
pZxid = 0x00000000000000
cversion = 0
dataVersion = 0
aclVersion = 0
ephemeralOwner = 0x00000000000000
dataLength = 0
----
/zookeeper/quota
cZxid = 0x00000000000000
ctime = Thu Jan 01 08:00:00 CST 1970
mZxid = 0x00000000000007
mtime = Sat Mar 17 11:03:24 CST 2018
pZxid = 0x00000000000000
cversion = 0
dataVersion = 6
aclVersion = 0
ephemeralOwner = 0x00000000000000
dataLength = 1
----
Session Details (sid, timeout, ephemeralCount):
0x10015f04f210000, 30000, 0
格式化输出的数据快照包含了全部的 ZNode 及其 Stat,但不包含 ZNode 的数据内容。
数据快照的生成
本质而言,数据快照的生成,即获取 ZKDatabase 的 DataTree 以及会话信息,序列化、生产 Checksum,最终落地文件。
ZooKeeper 允许配置两次数据快照生成之间的事务数 snapCount,但 snapCount 并不是严格约束,当且仅当以下条件满足时,生成数据快照:
上一次数据快照生成至今完成的事务数 > (snapCount + RANDOM(1, snapCount / 2))
此外,数据快照的生成、落地,全部由独立的线程完成,以最大可能地减少性能影响。
事务日志
ZooKeeper 配置包含了 dataDir 配置项,默认情况,事务日志存储于 dataDir 中的 version-2 路径:
- 日志文件以 log 作为前缀;
- 日志文件以 16 进制数作为后缀,即事务日志文件中第一条日志的 ZxId;
- 日志文件固定 67108880 字节(64 M)。
需要说明:version-2 的 2 代表了事务日志格式版的本(未来,若 ZooKeeper 进行事务日志格式的升级,路径名称即发生变化)。
限于篇幅,针对事务日志的写入过程,本文将不以展开,但必须注意,为了提高事务日志“落地”的性能,ZooKeeper 采取了若干措施:
- 日志文件所占用的磁盘空间是预分配的连续空间,67108880 字节,以“0”填充未使用部分;
- ZooKeeper 允许用户选择,事务日志写入后,是否通过 fsync 系统调用,强制将操作系统缓冲区的数据写入磁盘。
事务日志格式
事务日志记录了全部的“事务”,每一条记录都包括:事务时间、SessionId、CxId、ZxId、事务类型、事务相关的数据,事务日志写入文件前将进行序列化,并同时写入 Checksum。
ZooKeeper 内置了“事务日志格式化输出”工具,以查看日志文件 /data/svr/version-2/log.1 作为示例:
java -cp zookeeper-3.4.11.jar:lib/log4j-1.2.16.jar:lib/slf4j-log4j12-1.6.1.jar:lib/slf4j-api-1.6.1.jar org.apache.zookeeper.server.LogFormatter /data/svr/version-2/log.1
格式化的事务日志内容示例(//... 内容为本文添加的注释):
//
// 事务日志文件头(不显示事务日志文件头的 Magic 数)
//
ZooKeeper Transactional Log File with dbid 0 txnlog format version 2 // // 会话创建日志,事务相关的数据即为:会话超时时间 // 3/17/18 8:39:38 AM CST session 0x10015a4042e0000 cxid 0x0 zxid 0x1 createSession 30000 // // ZNode 创建日志,事务相关的数据: // ZNode Path // ZNode 数据内容:ASCII 编码,添加 # 作为前缀 // ZNode ACL 信息 // 是否“临时”(Ephemeral)ZNode(T - 是,F - 否) // 父级 ZNode 的 cversion(即 ZNode Stat 的子级 ZNode 版本号) // 3/17/18 8:39:53 AM CST session 0x10015a4042e0000 cxid 0x1 zxid 0x2 create '/p0,#6430,v{s{31,s{'world,'anyone}}},F,1 // // ZNode 数据写入日志,事务相关的数据:ZNode Path、ZNode 数据内容、父级 ZNode 的 cversion // 3/17/18 8:39:58 AM CST session 0x10015a4042e0000 cxid 0x2 zxid 0x3 setData '/p0,#6431,1 // // 会话关闭日志 // 3/17/18 8:40:01 AM CST session 0x10015a4042e0000 cxid 0x3 zxid 0x4 closeSession null // // 事务日志文件尾 // EOF reached after 4 txns.
ZooKeeper 启动时,将使用数据快照和事务日志共同完成数据的初始化。
ZooKeeper 会话管理
ZooKeeper 会话(Session),本质而言,即为客户端和服务端之间 TCP 连接的抽象。关于 ZooKeeper 会话相关的基础内容,请参阅《ZooKeeper 基本概念、使用方法、实践场景》,本章节,重点探讨会话的管理机制。
会话管理机制
ZooKeeper 会话,主要包含以下属性:
- sessionId:全局唯一的会话 Id;
- sessionTimeout:会话超时时间,必须说明:超时时间由 ZooKeeper 服务端最终确定;
- expirationTime:会话下一次超时的时间点;
- isClosing:会话是否关闭标记。
ZooKeeper 服务端,以“分桶”的形式进行会话管理,“桶”(bucket) 依据,即为 expirationTime,其计算方法:
expirationTime = ((currentTime + sessionTimeout) / expirationInterval + 1) * expirationInterval
代码所示的 expirationInterval 即为会话超时检查的时间间隔,以此实现:同一“桶”内的会话,超时时间点的间隔不超过会话超时检查的时间间隔。
当客户端向服务端发送请求(读、写、心跳),ZooKeeper 即进行一次“会话激活”,当且仅当会话的 isClosing 未被设置,即更新会话的 expirationTime,并移到新的“桶”。
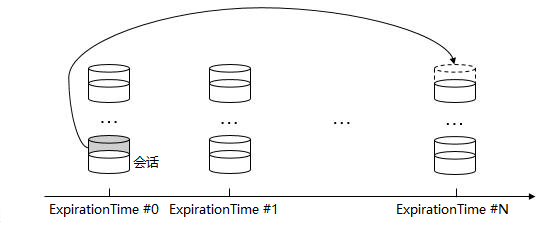
“分桶”管理的优势,在于能够方便地明确需要进行超时检查的会话集合(即 expirationTime 最小的“桶”),以快速地进行超时检查以及会话清理。
会话的“心跳”,完全由 ZooKeeper 客户端发起,会话只能由服务端确认“过期”(会话超时后,客户端使用原有会话的 SessionId 与服务端重新建立连接)。











