1、SPI简介
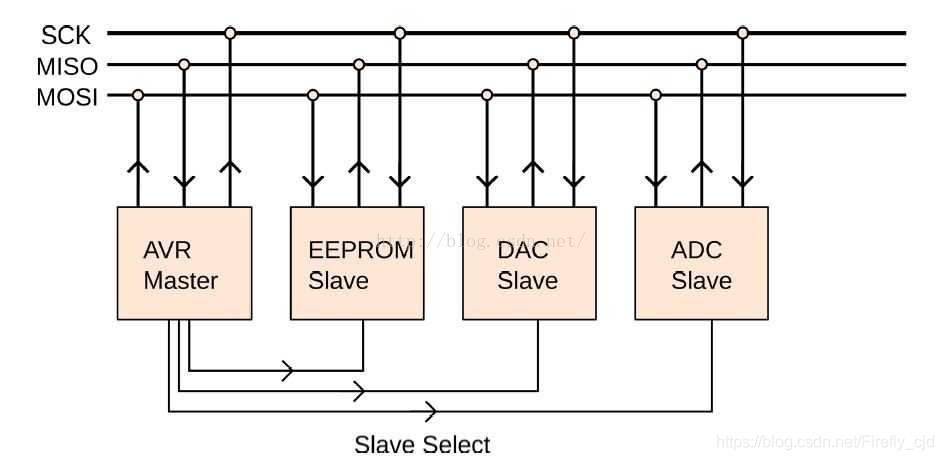
SPI 规定了两个 SPI 设备之间通信必须由主设备 (Master) 来控制次设备 (Slave). 一个 Master 设备可以通过提供 Clock 以及对 Slave 设备进行片选 (Slave Select) 来控制多个 Slave 设备, SPI 协议还规定 Slave 设备的 Clock 由 Master 设备通过 SCK 管脚提供给 Slave 设备, Slave 设备本身不能产生或控制 Clock, 没有 Clock 则 Slave 设备不能正常工作。
2、SPI特点
2.1、SPI控制方式
采用主-从模式(Master-Slave) 的控制方式。
SPI 规定了两个 SPI 设备之间通信必须由主设备 (Master) 来控制次设备 (Slave). 一个 Master 设备可以通过提供 Clock 以及对 Slave 设备进行片选 (Slave Select) 来控制多个 Slave 设备, SPI 协议还规定 Slave 设备的 Clock 由 Master 设备通过 SCK 管脚提供给 Slave 设备, Slave 设备本身不能产生或控制 Clock, 没有 Clock 则 Slave 设备不能正常工作。
2.2、SPI传输方式
采用同步方式(Synchronous)传输数据
Master 设备会根据将要交换的数据来产生相应的时钟脉冲(Clock Pulse), 时钟脉冲组成了时钟信号(Clock Signal) , 时钟信号通过时钟极性 (CPOL) 和 时钟相位 (CPHA) 控制着两个 SPI 设备间何时数据交换以及何时对接收到的数据进行采样, 来保证数据在两个设备之间是同步传输的。
2.3、SPI数据交换
SPI数据交换框图
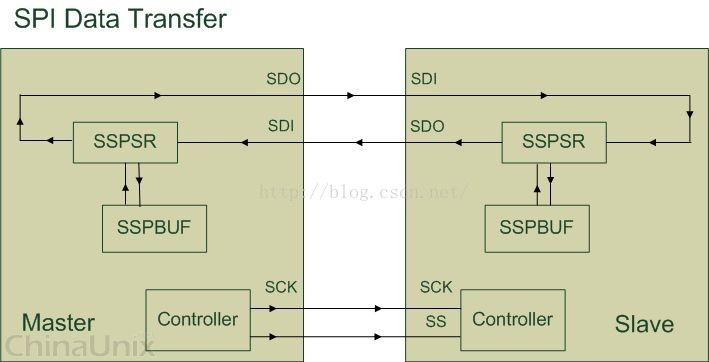
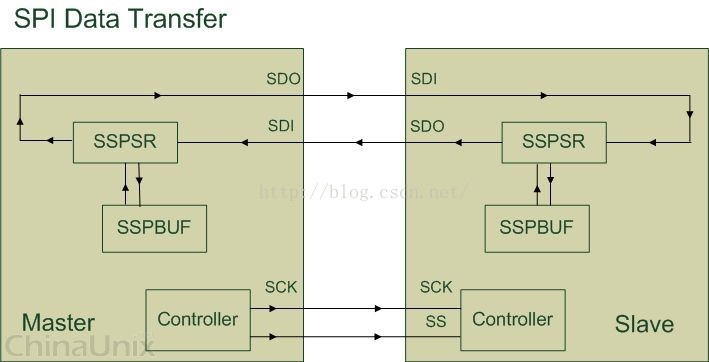
上图只是对 SPI 设备间通信的一个简单的描述, 下面就来解释一下图中所示的几个组件(Module):
SSPBUF,Synchronous Serial Port Buffer, 泛指 SPI 设备里面的内部缓冲区, 一般在物理上是以 FIFO 的形式, 保存传输过程中的临时数据;
SSPSR, Synchronous Serial Port Register, 泛指 SPI 设备里面的移位寄存器(Shift Regitser), 它的作用是根据设置好的数据位宽(bit-width) 把数据移入或者移出 SSPBUF;
Controller, 泛指 SPI 设备里面的控制寄存器, 可以通过配置它们来设置 SPI 总线的传输模式。
SPI 设备间的数据传输之所以又被称为数据交换, 是因为 SPI 协议规定一个 SPI 设备不能在数据通信过程中仅仅只充当一个 "发送者(Transmitter)" 或者 "接收者(Receiver)". 在每个 Clock 周期内, SPI 设备都会发送并接收一个 bit 大小的数据, 相当于该设备有一个 bit 大小的数据被交换了. 一个 Slave 设备要想能够接收到 Master 发过来的控制信号, 必须在此之前能够被 Master 设备进行访问 (Access). 所以, Master 设备必须首先通过 SS/CS pin 对 Slave 设备进行片选, 把想要访问的 Slave 设备选上. 在数据传输的过程中, 每次接收到的数据必须在下一次数据传输之前被采样. 如果之前接收到的数据没有被读取, 那么这些已经接收完成的数据将有可能会被丢弃, 导致 SPI 物理模块最终失效. 因此, 在程序中一般都会在 SPI 传输完数据后, 去读取 SPI 设备里的数据, 即使这些数据(Dummy Data)在我们的程序里是无用的。
2.4、SPI传输模式
上升沿、下降沿、前沿、后沿触发。当然也有MSB和LSB传输方式.
3、工作机制
3.1、相关缩写
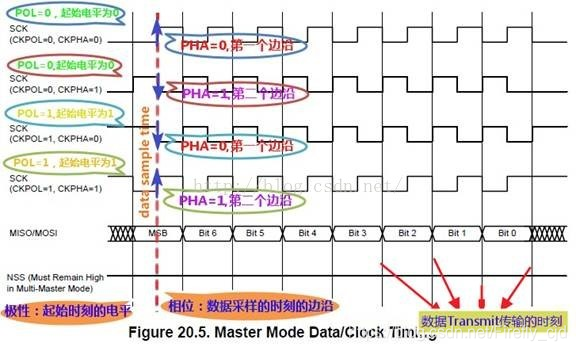
SPI的极性Polarity和相位Phase,最常见的写法是CPOL和CPHA,不过也有一些其他写法,简单总结如下:
(1) CKPOL (Clock Polarity) = CPOL = POL = Polarity = (时钟)极性
(2) CKPHA (Clock Phase) = CPHA = PHA = Phase = (时钟)相位
(3) SCK=SCLK=SPI的时钟
(4) Edge=边沿,即时钟电平变化的时刻,即上升沿(rising edge)或者下降沿(falling edge)
对于一个时钟周期内,有两个edge,分别称为:
Leading edge=前一个边沿=第一个边沿,对于开始电压是1,那么就是1变成0的时候,对于开始电压是0,那么就是0变成1的时候;
Trailing edge=后一个边沿=第二个边沿,对于开始电压是1,那么就是0变成1的时候(即在第一次1变成0之后,才可能有后面的0变成1),对于开始电压是0,那么就是1变成0的时候;
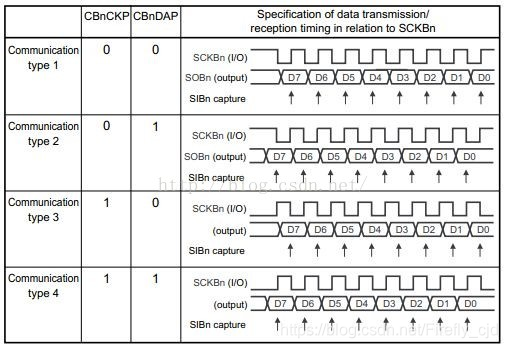
3.2、CPOL极性
先说什么是SCLK时钟的空闲时刻,其就是当SCLK在数发送8个bit比特数据之前和之后的状态,于此对应的,SCLK在发送数据的时候,就是正常的工作的时候,有效active的时刻了。
先说英文,其精简解释为:Clock Polarity = IDLE state of SCK。
再用中文详解:
SPI的CPOL,表示当SCLK空闲idle的时候,其电平的值是低电平0还是高电平1:
CPOL=0,时钟空闲idle时候的电平是低电平,所以当SCLK有效的时候,就是高电平,就是所谓的active-high;
CPOL=1,时钟空闲idle时候的电平是高电平,所以当SCLK有效的时候,就是低电平,就是所谓的active-low;
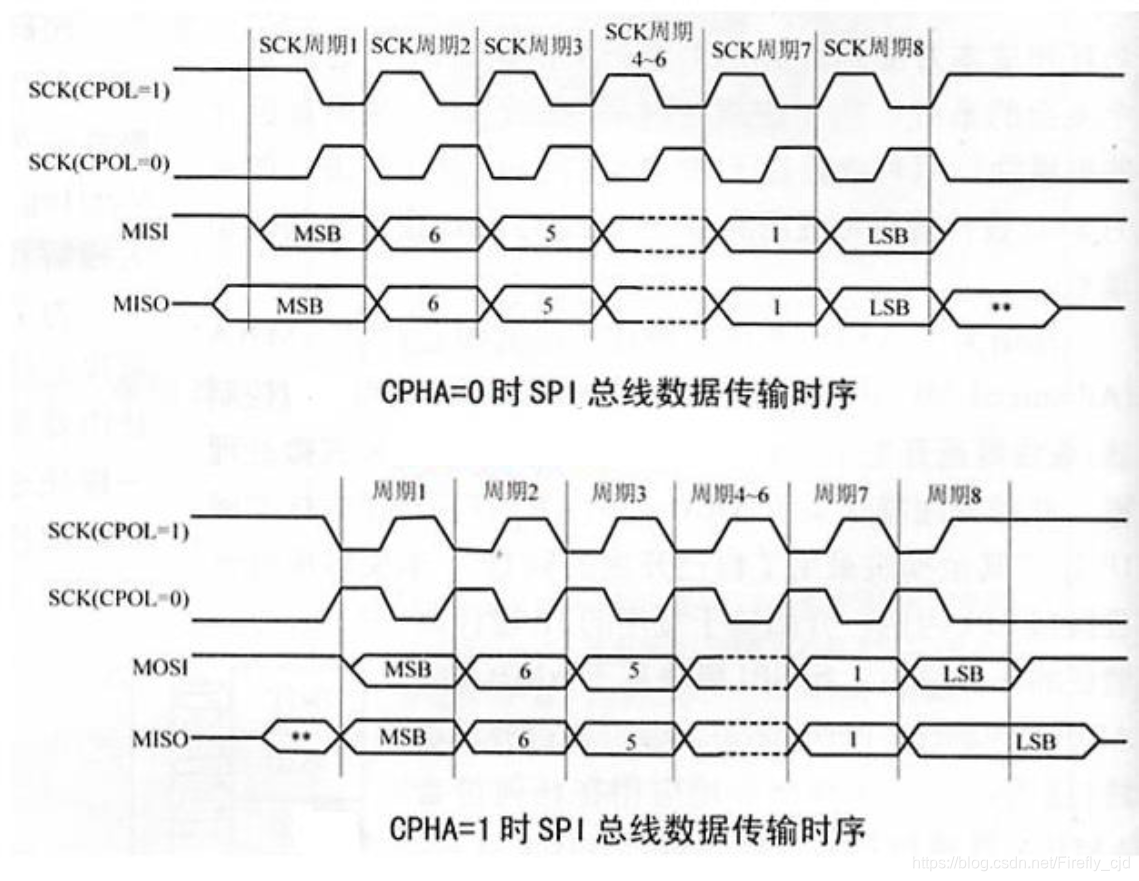
3.3、CPHA相位
首先说明一点,capture strobe = latch = read = sample,都是表示数据采样,数据有效的时刻。相位,对应着数据采样是在第几个边沿(edge),是第一个边沿还是第二个边沿,0对应着第一个边沿,1对应着第二个边沿。
对于:
CPHA=0,表示第一个边沿:
对于CPOL=0,idle时候的是低电平,第一个边沿就是从低变到高,所以是上升沿;
对于CPOL=1,idle时候的是高电平,第一个边沿就是从高变到低,所以是下降沿;
CPHA=1,表示第二个边沿:
对于CPOL=0,idle时候的是低电平,第二个边沿就是从高变到低,所以是下降沿;
3.4、极性和相位图示
图例1
图例2
3.5 、软件设置极性和相位
SPI分主设备和从设备,两者通过SPI协议通讯。
而设置SPI的模式,是从设备的模式,决定了主设备的模式。
所以要先去搞懂从设备的SPI是何种模式,然后再将主设备的SPI的模式,设置和从设备相同的模式,即可正常通讯。
对于从设备的SPI是什么模式,有两种:
1.固定的,有SPI从设备硬件决定的
SPI从设备,具体是什么模式,相关的datasheet中会有描述,需要自己去datasheet中找到相关的描述,即:
关于SPI从设备,在空闲的时候,是高电平还是低电平,即决定了CPOL是0还是1;
然后再找到关于设备是在上升沿还是下降沿去采样数据,这样就是,在定了CPOL的值的前提下,对应着可以推算出CPHA是0还是1了。
2.可配置的,由软件自己设定
从设备也是一个SPI控制器,4种模式都支持,此时只要自己设置为某种模式即可。
然后知道了从设备的模式后,再去将SPI主设备的模式,设置为和从设备模式一样,即可。
对于如何配置SPI的CPOL和CPHA的话,不多细说,多数都是直接去写对应的SPI控制器中对应寄存器中的CPOL和CPHA那两位,写0或写1即可。
4、STM32的SPI控制模块
SPI是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,STM32也有SPI接口。
SPI接口一般使用4条线通信:
MISO 主设备数据输入,从设备数据输出。
MOSI 主设备数据输出,从设备数据输入。
SCLK 时钟信号,由主设备产生。
CS 从设备片选信号,由主设备控制。
SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。
STM32的SPI功能很强大,SPI时钟最多可以到18Mhz,支持DMA,可以配置为SPI协议或者I2S协议
关于SPI,从数据手册查到
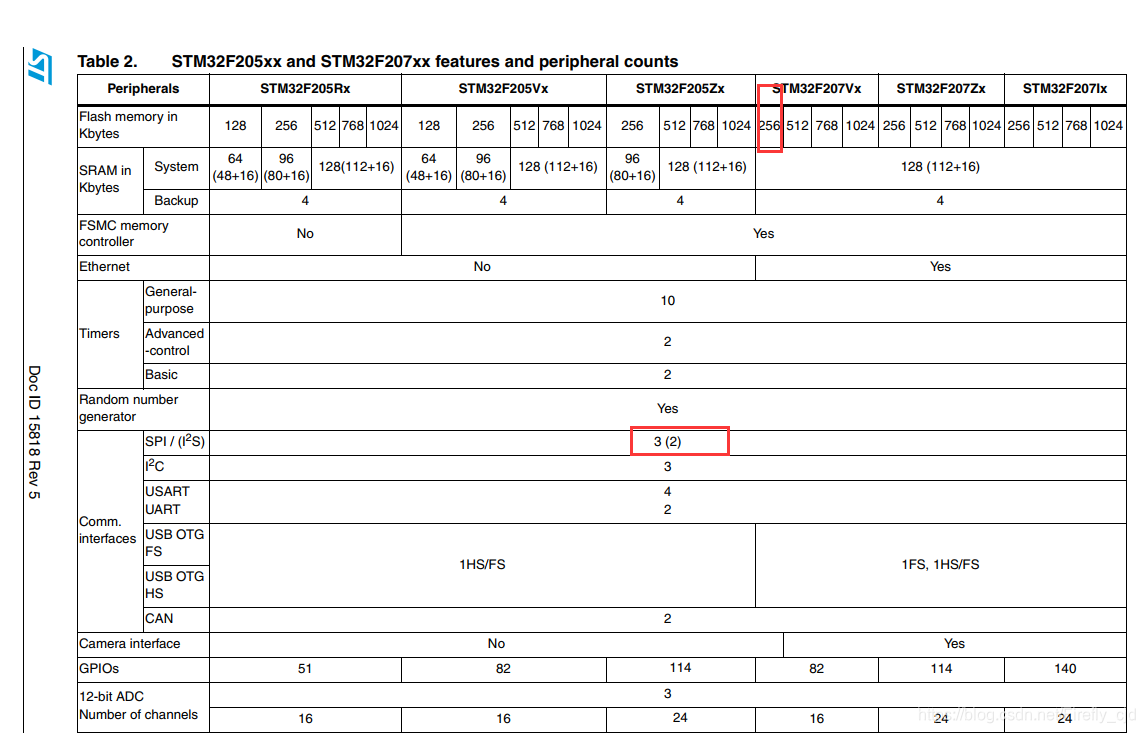
STM32F207VCT6共有3个SPI。
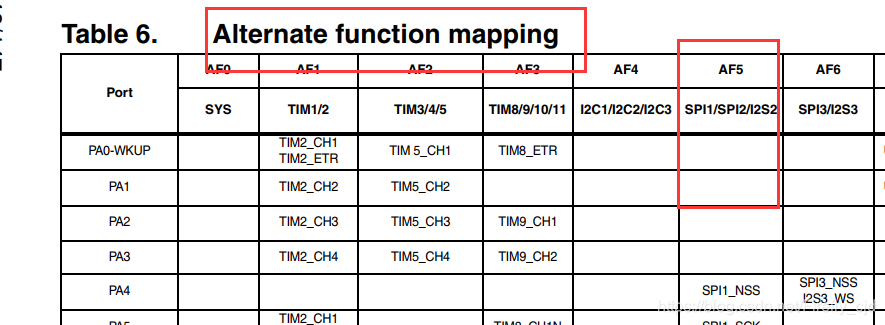
从下表查出每个SPI对应的管脚
STM32标准外设库SPI_InitTypeDef的定义
typedef struct
{
uint16_t SPI_Direction; // 设置SPI 的通信方式,可以选择为半双工,全双工,以及串行发和串行收方式
uint16_t SPI_Mode; // 设置SPI 的主从模式
uint16_t SPI_DataSize; // 为8 位还是16 位帧格式选择项
uint16_t SPI_CPOL; // 设置时钟极性
uint16_t SPI_CPHA; // 设置时钟相位
uint16_t SPI_NSS; //设置NSS 信号由硬件(NSS管脚)还是软件控制
uint16_t SPI_BaudRatePrescaler; //设置SPI 波特率预分频值
uint16_t SPI_FirstBit; //设置数据传输顺序是MSB 位在前还是LSB 位在前
uint16_t SPI_CRCPolynomial; //设置CRC 校验多项式,提高通信可靠性,大于1 即可
}SPI_InitTypeDef;
第一个参数SPI_Direction 是用来设置SPI的通信方式,可以选择为半双工,全双工,以及串行发和串行收方式,这里我们选择全双工模式SPI_Direction_2Lines_FullDuplex。
第二个参数SPI_Mode用来设置SPI的主从模式,这里我们设置为主机模式 SPI_Mode_Master,当然有需要你也可以选择为从机模式 SPI_Mode_Slave。
第三个参数SPI_DataSiz为8位还是16位帧格式选择项,这里我们是8位传输,选择SPI_DataSize_8b。
第四个参数SPI_CPOL用来设置时钟极性,我们设置串行同步时钟的空闲状态为高电平所以我们选择SPI_CPOL_High。
第五个参数SPI_CPHA 用来设置时钟相位,也就是选择在串行同步时钟的第几个跳变沿(上升或下降)数据被采样,可以为第一个或者第二个条边沿采集,这里我们选择第二个跳变沿,所以选择 SPI_CPHA_2Edge
第六个参数SPI_NSS设置NSS信号由硬件(NSS管脚)还是软件控制,这里我们通过软件控制NSS关键,而不是硬件自动控制,所以选择 SPI_NSS_Soft。
第七个参数 SPI_BaudRatePrescaler很关键,就是设置 SPI 波特率预分频值也就是决定 SPI 的时钟的参数,从不分频道256分频8个可选值,初始化的时候我们选择256分频值SPI_BaudRatePrescaler_256,传输速度为36M/256=140.625KHz。
第八个参数 SPI_FirstBit设置数据传输顺序是 MSB 位在前还是LSB位在前,这里我们选择SPI_FirstBit_MSB高位在前。
第九个参数 SPI_CRCPolynomial是用来设置CRC校验多项式,提高通信可靠性,大于1即可。
示例代码:
void SPIInit( void )
{
SPI_InitTypeDef SPI_InitStructure;
FLASH_GPIO_Init();
/*!< Deselect the FLASH: Chip Select high */
GPIO_SetBits( GPIOA, GPIO_Pin_4 );
/*!< SPI configuration */
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; /* 双线双向全双工 */
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; /* 主 SPI */
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; /* SPI 发送接收 8 位帧结构 */
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; /* 串行同步时钟的空闲状态为高电平 */
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; /* 第二个跳变沿数据被采样 */
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; /* NSS 信号由软件控制 */
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16; /* 预分频 16 */
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; /* 数据传输从 MSB 位开始 */
SPI_InitStructure.SPI_CRCPolynomial = 7; /* CRC 值计算的多项式 */
SPI_Init( SPI1, &SPI_InitStructure );
/*!< Enable the sFLASH_SPI */
SPI_Cmd( SPI1, ENABLE );
}
看到这里,可能觉的前面讲原理并没有太大的用处,因为STM32集成了SPI控制器,配置一下即可。
一方面我们学习原理是为了更好的理解SPI,用于对接不同的SPI设备,像norflash的spi驱动网上有大量的例子,不容易出错。但并不是特别常见的,spi驱动SD卡,SPI驱动网络PHY,SPI驱动ESP8266,甚至在设计两个IC通信时,由于没有过多GPIO,又觉的IIC通信速度慢的话,可以设计两个IC之间使用SPI通信,显然这些场景就需要了解SPI的原理
另外一方面,实际应用中,有可能因为芯片其他管脚用于特殊功能,留下的管脚没有硬件SPI功能,只能模拟实现,这个时候学习SPI原理就很有必要了。
5、SPI的应用
SPI的常用应用NorFlash
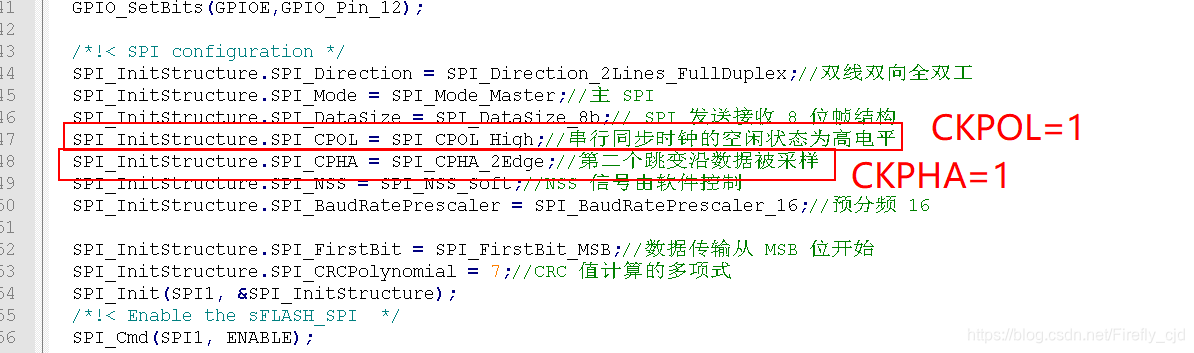
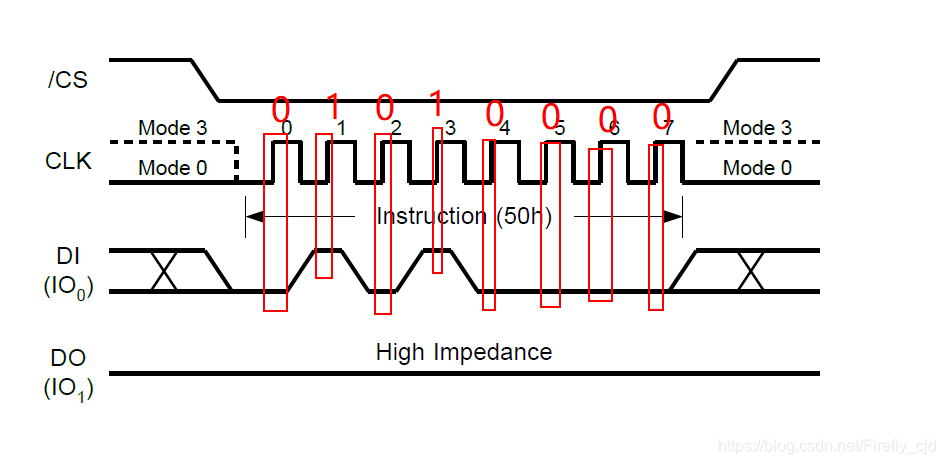
从数据手册上看到,SPI传输:CKPOL=1 , CKPHA=1
所以STM32的SPI读取NorFlash的配置如下
抓取下面代码波形
抓取的波形如下
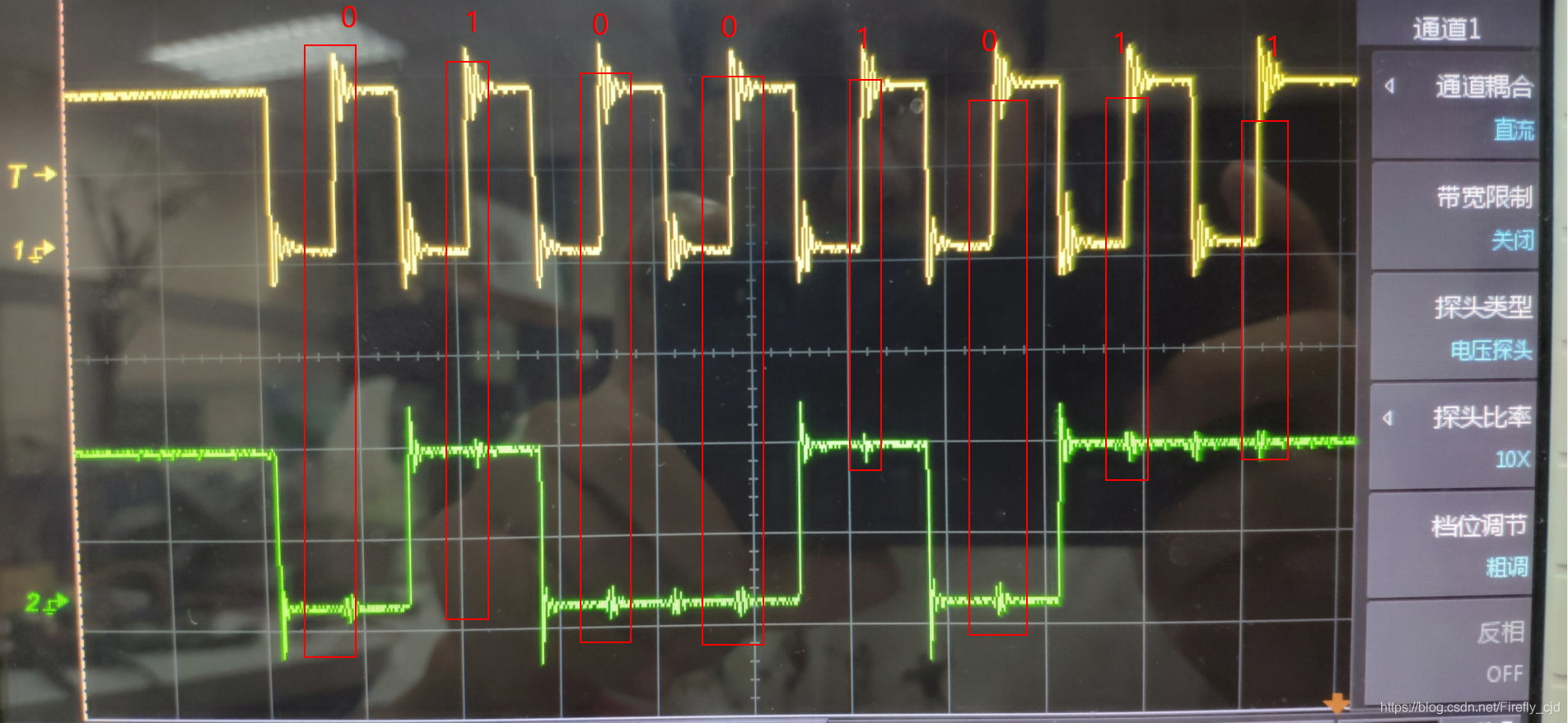
0100 1011 就是0X4B
其中看到:
起始电平是高电平,也就是CKPOL=1
第二个边沿采样,也就是CKPHA=1
其实说成类似IIC的高电平有效也是没有问题的
下面这句话是写模拟SPI的核心
自己的理解:在下降沿转换数据,在上升沿采样数据
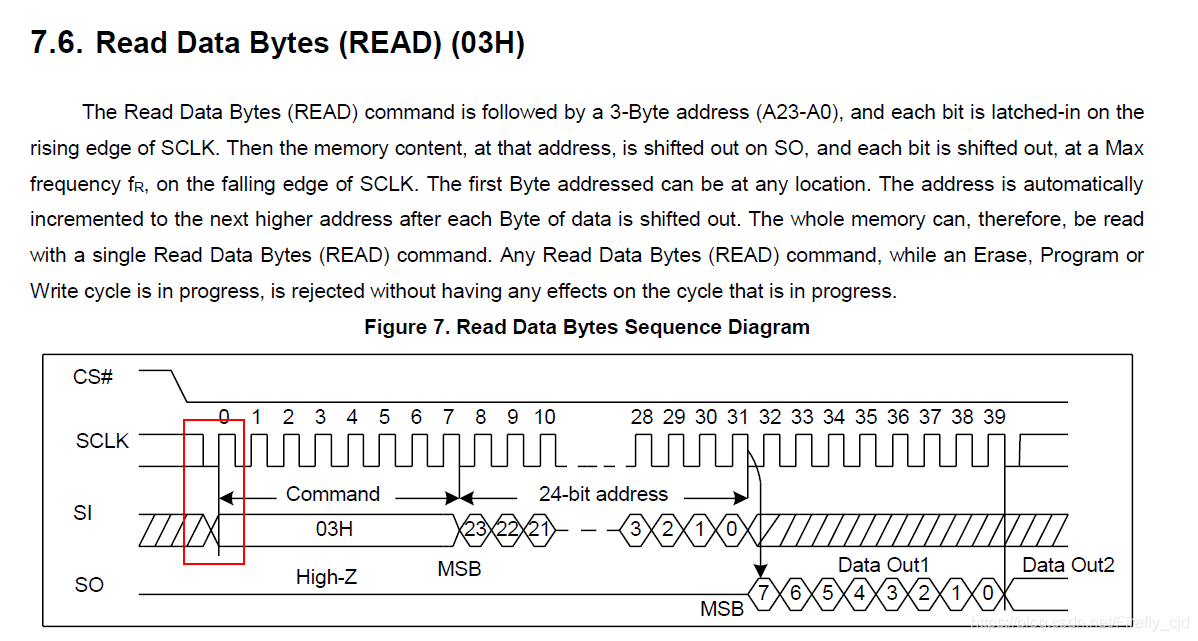
除了抓取波形,在华邦Flash也看到了时序图
6、code
读取norflash
使用STM32F207硬件SPI模块
/**
* @brief Initializes the peripherals used by the SPI FLASH driver.
* @param None
* @retval None
*/
void FLASH_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/*!< Enable the SPI clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
/*!< Enable GPIO clocks */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);
/*!< SPI pins configuration *************************************************/
/*!< Connect SPI pins to AF5 */
GPIO_PinAFConfig(GPIOA, 5, GPIO_AF_SPI1);
GPIO_PinAFConfig(GPIOA, 6, GPIO_AF_SPI1);
GPIO_PinAFConfig(GPIOB, 5, GPIO_AF_SPI1);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//GPIO_PuPd_DOWN;
/*!< SPI SCK pin configuration */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*!< SPI MISO pin configuration */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*!< SPI MOSI pin configuration */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/*!< Configure sFLASH Card CS pin in output pushpull mode */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOE, &GPIO_InitStructure);
}
/**
* @brief Initializes the peripherals used by the SPI FLASH driver.
* @param None
* @retval None
*/
void FLASH_SPIInit(void)
{
SPI_InitTypeDef SPI_InitStructure;
FLASH_GPIO_Init();
/*!< Deselect the FLASH: Chip Select high */
GPIO_SetBits(GPIOE,GPIO_Pin_12);
/*!< SPI configuration */
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;//双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;//主 SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;// SPI 发送接收 8 位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;//串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;//第二个跳变沿数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;//NSS 信号由软件控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16;//预分频 16
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;//数据传输从 MSB 位开始
SPI_InitStructure.SPI_CRCPolynomial = 7;//CRC 值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure);
/*!< Enable the sFLASH_SPI */
SPI_Cmd(SPI1, ENABLE);
}
软件模拟SPI协议
/**
* @brief Sends a byte through the SPI interface and return the byte received
* from the SPI bus.
* @param byte: byte to send.
* @retval The value of the received byte.
*/
uint8_t SPI_ReadWriteByte(uint8_t data)
{
uint8_t i,data_read = 0;
if(data!=0xA5){
for(i=0;i<8;i++){
MSPI_CLK_L();
if(data&0x80){
MSPI_MOSI_H();
}else{
MSPI_MOSI_L();
}
MSPI_DELAY();
data = data<<1;
MSPI_CLK_H();
MSPI_DELAY();
}
return data_read;
}else{
for(i=0;i<8;i++){
MSPI_CLK_L();
MSPI_DELAY();
data_read = data_read<<1;
MSPI_CLK_H();
if(MSPI_READ_IN()){
data_read |= 0x01;
}
MSPI_DELAY();
}
return data_read;
}
}
/**
* @brief Initializes the peripherals used by the SPI FLASH driver.
* @param None
* @retval None
*/
void FLASH_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/*!< Enable GPIO clocks */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);
/*!< Configure sFLASH Card CS pin in output pushpull mode */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOE, &GPIO_InitStructure);
/*!< SPI SCK pin configuration */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_Init(GPIOA, &GPIO_InitStructure);
MSPI_CLK_H();
/*!< SPI MOSI pin configuration */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_Init(GPIOB, &GPIO_InitStructure);
MSPI_MOSI_H();
/*!< SPI MISO pin configuration */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
/**
* @brief Initializes the peripherals used by the SPI FLASH driver.
* @param None
* @retval None
*/
void FLASH_SPIInit(void)
{
FLASH_GPIO_Init();
/*!< Deselect the FLASH: Chip Select high */
GPIO_SetBits(GPIOE,GPIO_Pin_12);
}
开源地址:
https://github.com/strongercjd/STM32F207VCT6
点击查看本文所在的专辑,STM32F207教