ROS2机器人中间架构(RMF,Robotics Middleware Framework)已经完全支持foxy。

稍后会有专题,介绍相关内容。
官方还有电子书(168页):
太棒了!!!
在ROS工业官网(rosindustrial.org)有一段话:
机器翻译:
与所有会议成员一样,ROS-I将致力于推动参与度的改善,完善ROS-1能力塑造的策略,尤其是有关ROS2的最新发展以及在工业界向ROS2过渡的过程。
今年3月10日是世界MoveIt节

已经第六届了。
关于ROS2模块组件时延的问题有一篇论文:
三维纹理分析库

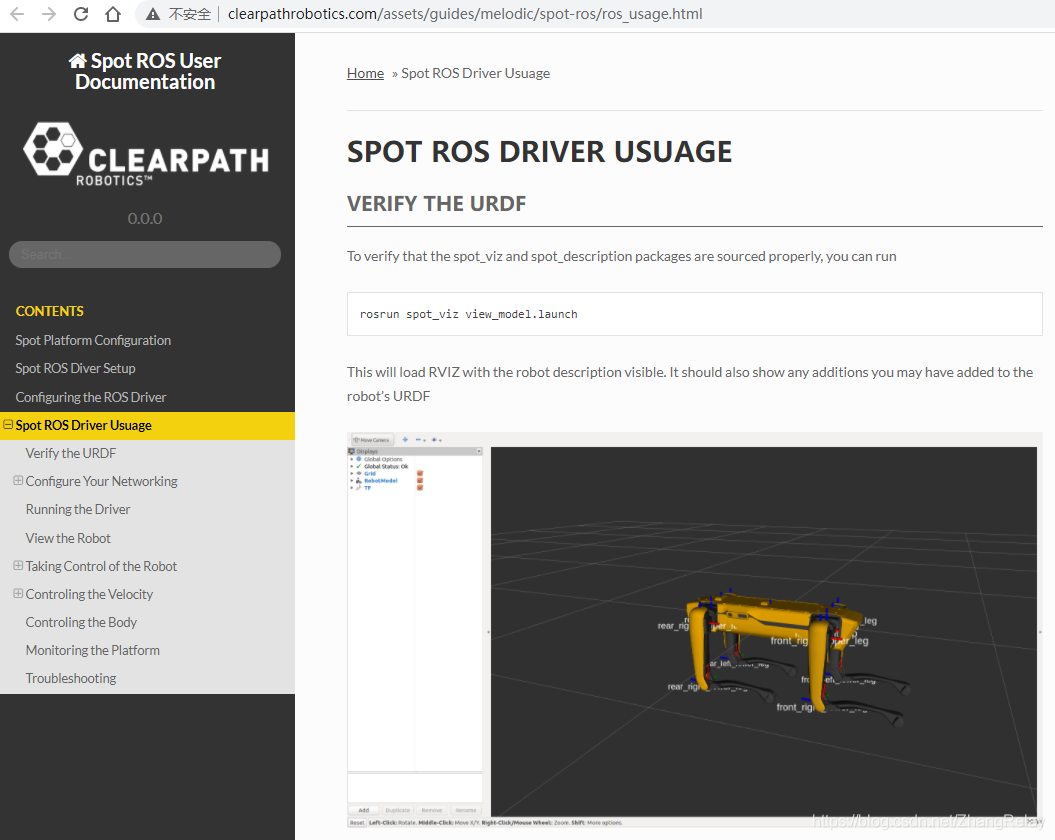
如果需要玩耍spot仿真,推荐这个网址的教程:
自动驾驶赛车

酷炫。
仓储和物流机器人:


自动驾驶:apex.ai
Robot一百年!(1921-2021)

一个很特别的ROS2教程:

多机器人:
点云处理:
比CPU快10倍。
本文同步分享在 博客“zhangrelay”(CSDN)。
如有侵权,请联系 support@oschina.cn 删除。
本文参与“OSC源创计划”,欢迎正在阅读的你也加入,一起分享。